无人机 | 2024年电控技术方案——电源系统技术方案
电源系统技术方案
无人机的供电系统由几个部分决定:
设备供电需求
分电板选择型号
供电电池组数
这三者之间是相互关联,相互限制的。少一个考虑的因素都不可以。
供电需求
动力系统供电需求
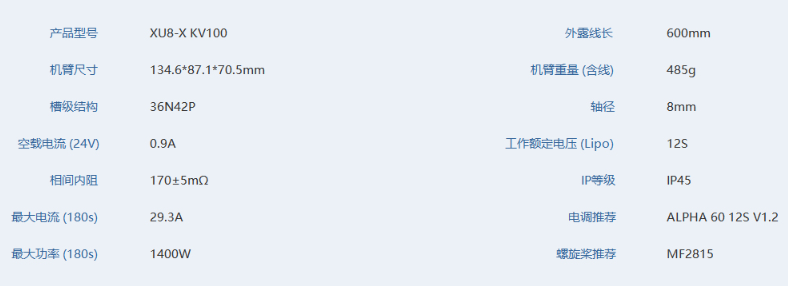
天行者一号采用的是T-Motor XU8-X一体化动力系统,是一个高电压需求,高电流需求,动力强大的动力系统。其供电电压需求为12S。
从我们的选型上看,XU8-X KV100,其最大电流为29.3A,最大功率为1400W,可以简单算以下:
所需电压即为47.8V, 需要12S电压供电。当然,其工作额定电压(Lipo)的具体数值也在表中体现了。
飞控系统供电需求
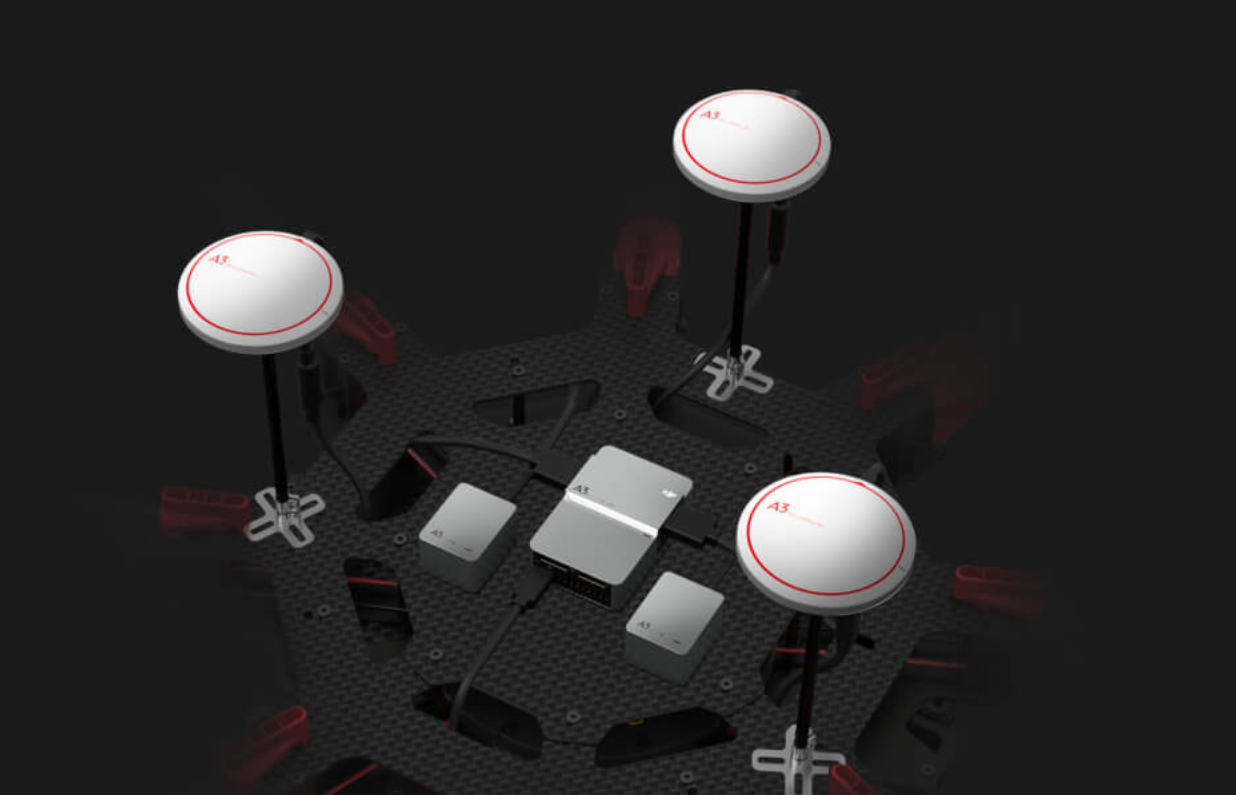
天行者一号采用的是DJI A3 Pro+DJI Guiadance组合。两者的供电需求都是6S。同时,配备数据采集器Datalink,其供电需求同为6S
云台部分供电需求
云台部分总供电为6S,再通过两块中心版分出电源线和信号线。
分电板选型
根据上述三个部分的供电需求,我们选择了EFT无人机分电板。

这个型号的分电板有以下特征:
电调接口为XT90
电调接口为12S供电
支持四旋翼和六旋翼
两路电源线串联
顶部预留2路6S供电
顶部预留2路12S供电
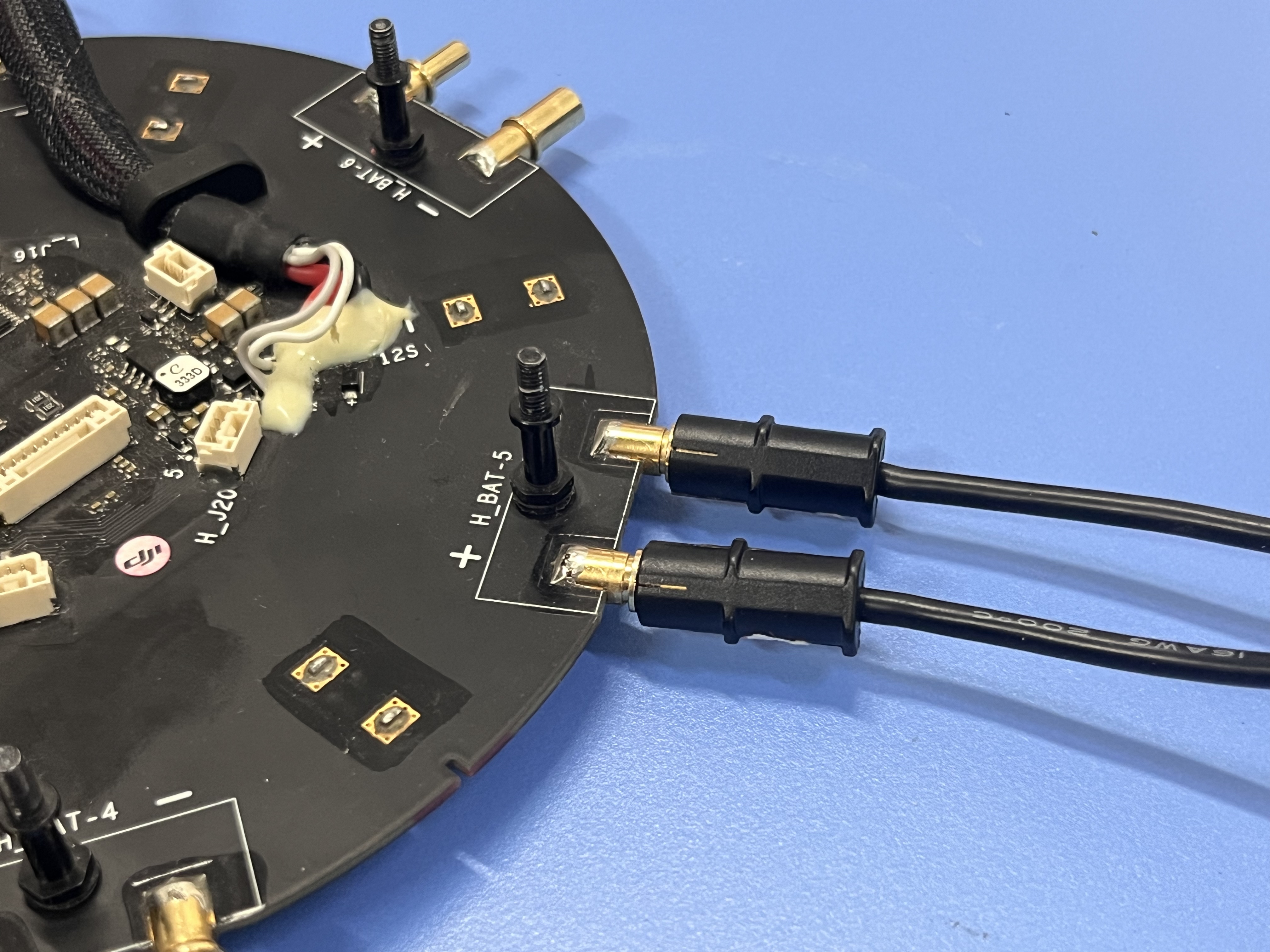
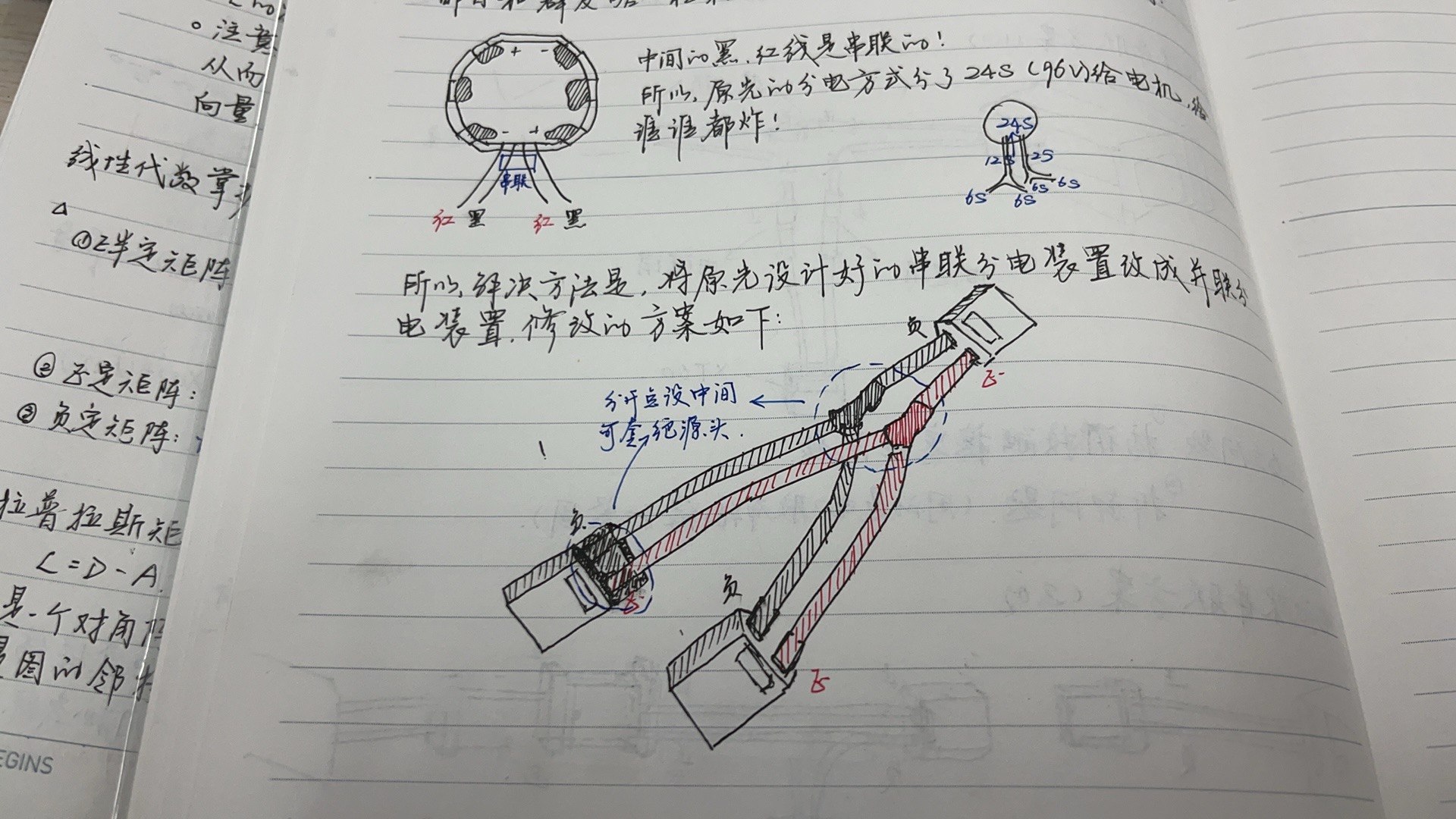
将根据以上接口来设计供电方案。输出电压已经根据其接口确定了,现在就需要确定输入的电压。根据厂家的“温馨提示”:该分电板是两路串联,必须两块电池接好才可正常使用,如果需要6S供电,请接最左边红线,和最右边黑线,中间两根是串联节点,是短路的,不能接。 可以知道,左边一组红黑线与右边一组红黑线应该是串联12S。故,一组红黑线是6S。这是极其关键的问题。
我在最初焊接的时候由于并没有认真阅读手册,反复确认方案的可行性,造成一组红黑线12S,两组串联24S(96V)的极高电压,导致了致命错误,造成无法挽回的时间损失和经济损失。具体试错详情请看 试错集锦 | 无人机电源总线焊接错误导致近5000元损失
供电电池组数
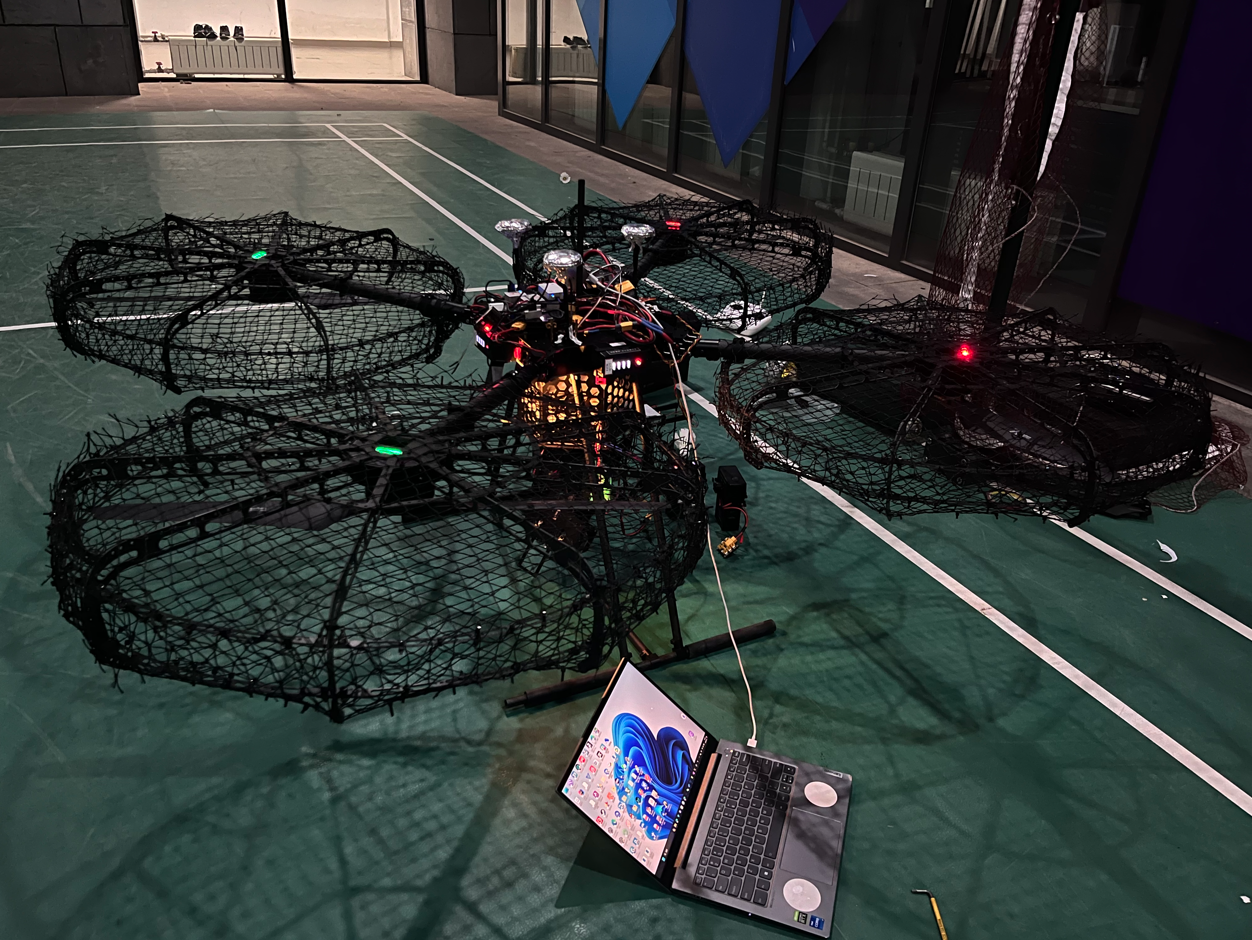
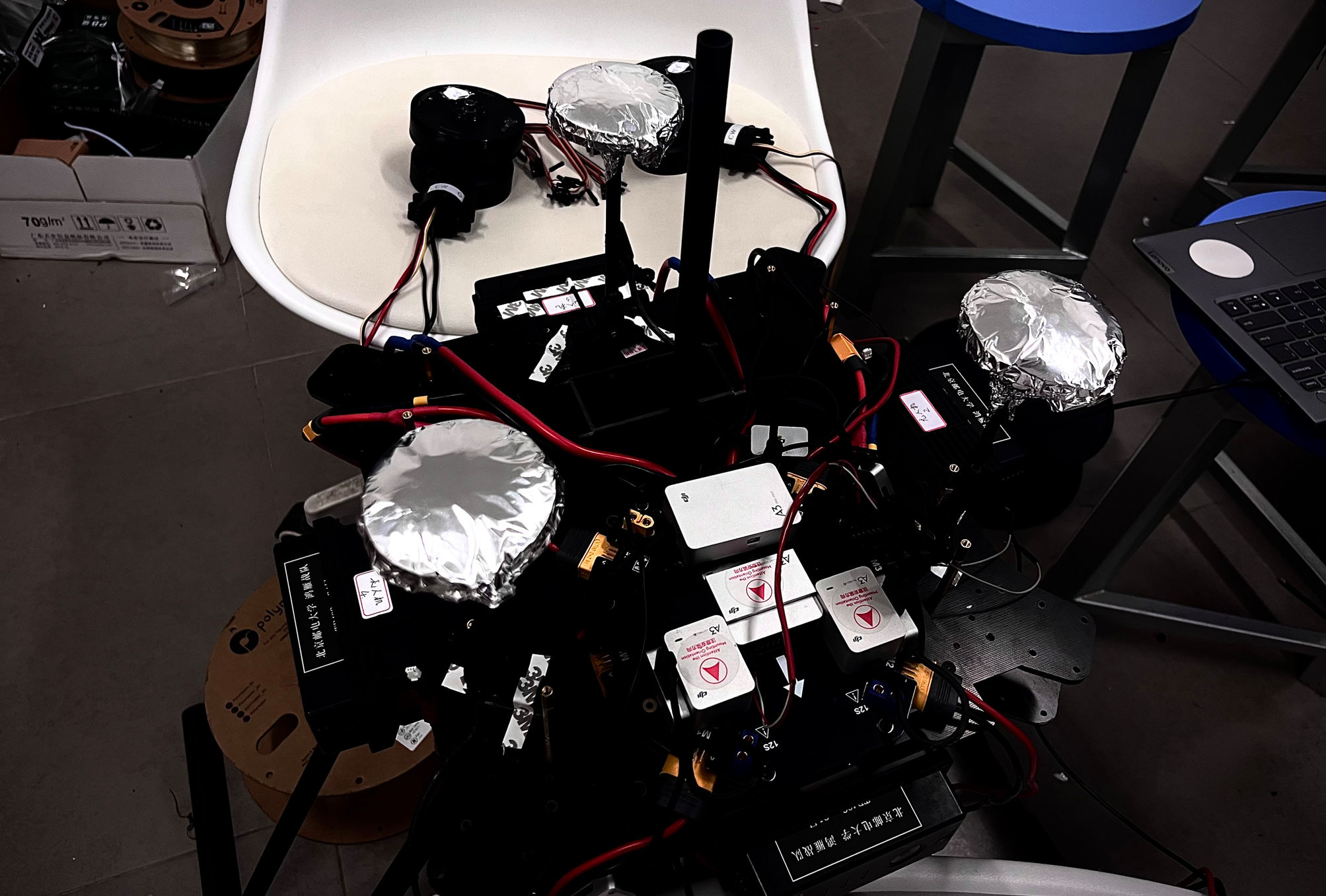
为了保证无人机拥有足够的续航时间,保证无人机在空中飞行的稳定性,我们采用四电方案,即无人机携带四块电池供电。
根据分电板选型的特点,四块电池最后需要满足分电板的两路6S。一块电池是6S,因此四块电池需要两两一组并联,分别接入分电板的两组红黑线。
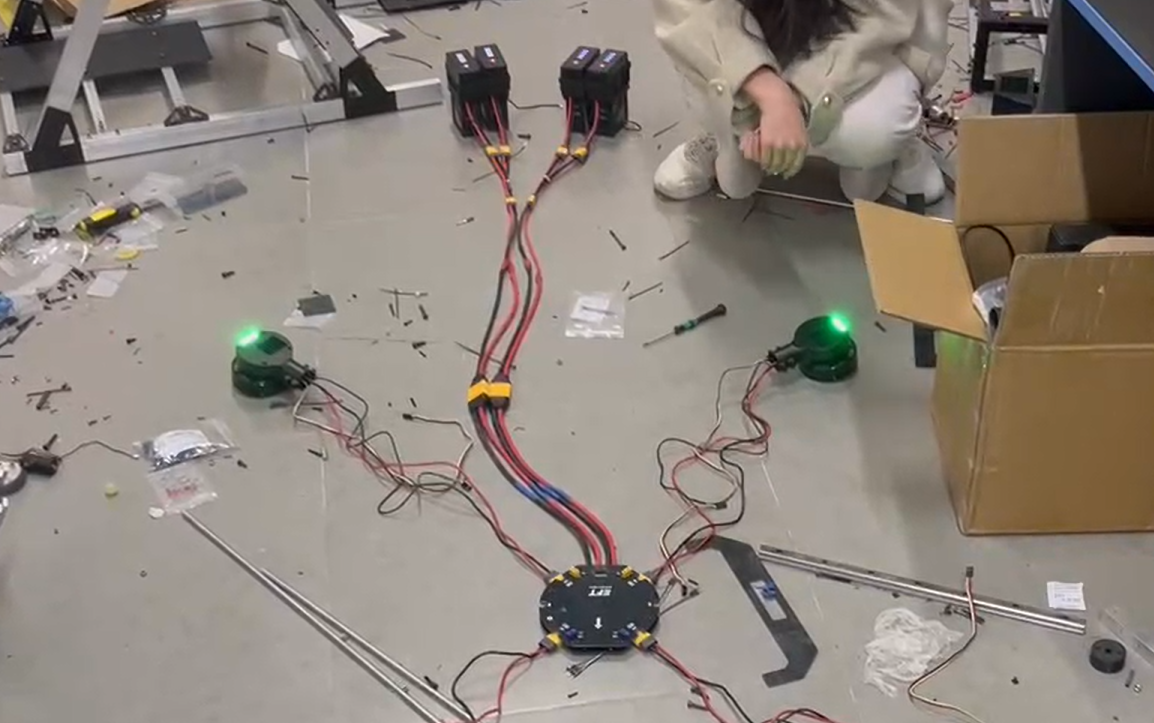
如上图所示,就是电池组的并联接法。而从图中,也可以看出整体的供电系统全貌。
供电系统接口详述
电池支架
由于新买的电池支架电源对外接口,是香蕉头。其实这不是严格意义上的香蕉头,而更像是XT30单独拆开的一个金属头。它有两个缺点:
并联焊接难度大,只能外接插拔装置
反复插拔容易松动
同时,它并不适应于整体线序的齐整性。因为这是专门针对于大疆M600机型分电板自己做的一个接头。如图。
前期串联接线方式:

原始的电池支架接头:
 原始电池支架的接头与M600分电板连接:
原始电池支架的接头与M600分电板连接:
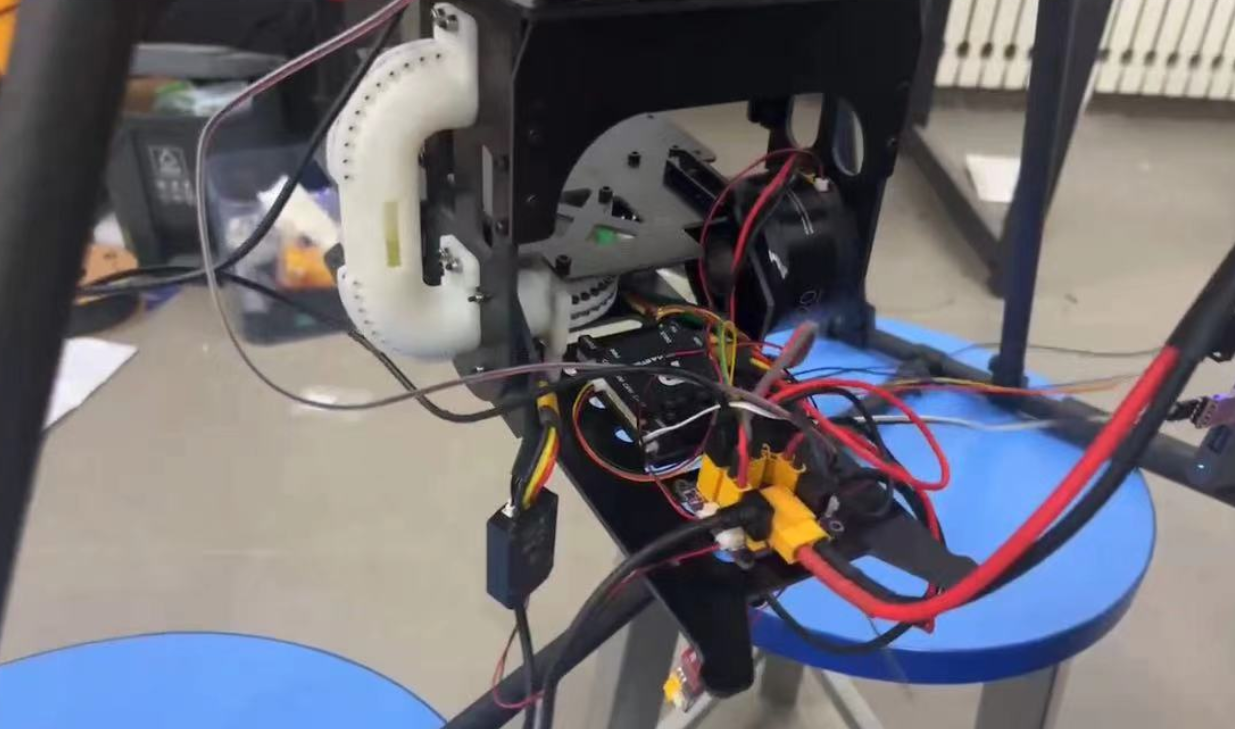
可见,这样的头并不适合用作电池的并联。于是,决定改装电池支架。大疆的电池支架在输出接口处可以拆卸,拆卸之后将两个香蕉头线卸下,随后焊接能够承载足够大电流的12AWG线(AWG: American Wire Gauge),并在其输出端口焊接XT60的母头。

可以看见,这一块pcb板上端有一根信号线,这条信号线是电池内部芯片和外部的通信线,可以作为未来实现同时上电的接线。
主电源线
主电源线分成三个部分。
电池并连线
电池与分电板转接线
分电板延长线
电池并连线
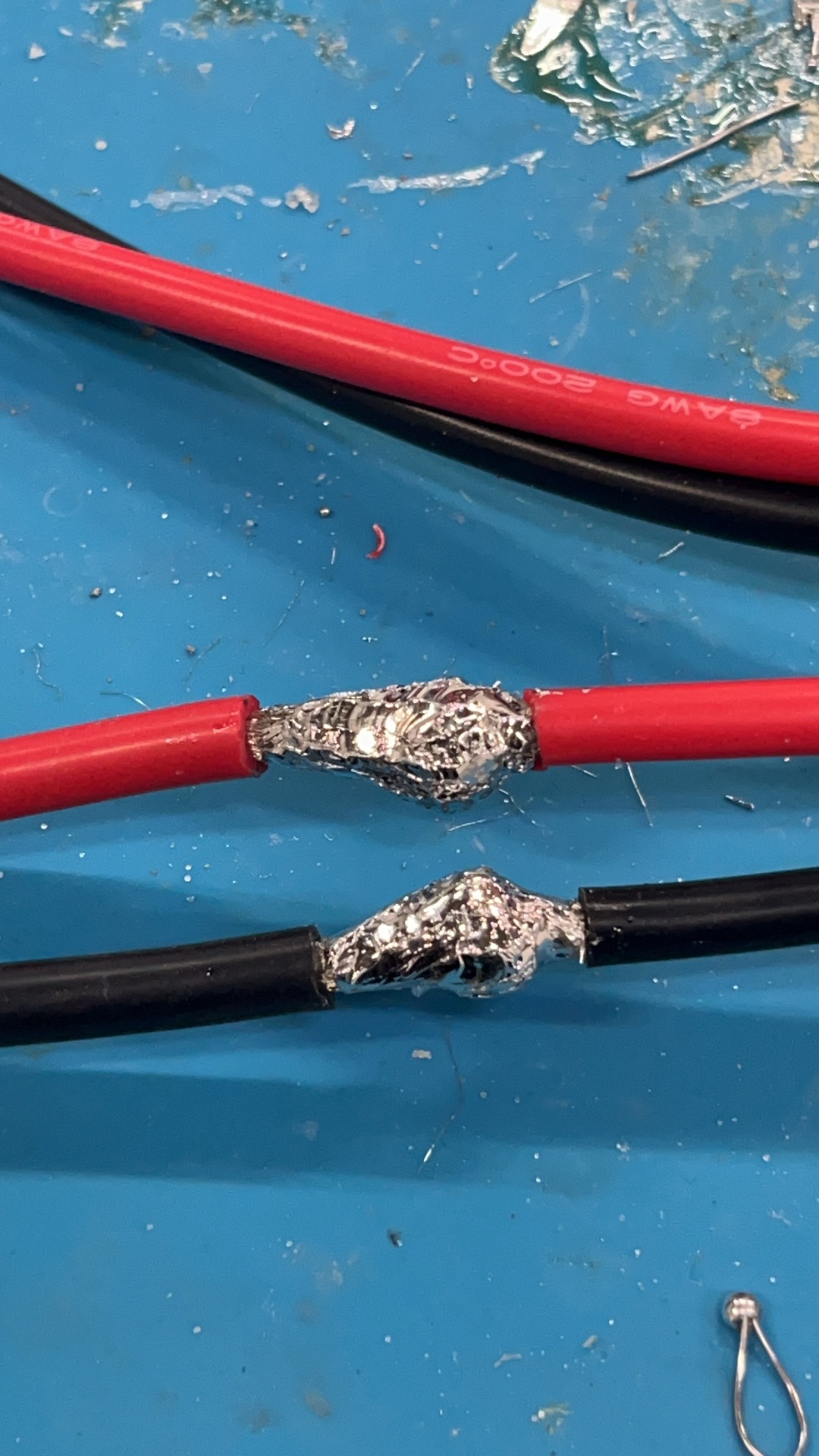
电池的串并联都可以通过自行焊线来实现。而我们的方案是实现电池的并联,因而我自行设计的如下的并连线焊接方案:
可以看见,这是一条XT60的公转公。一端是一个头,作为总输出;一端是两个头,作为两个电池的电源输入。严格意义上来说,在输出端应该焊接一个母头。
最终的焊接成品如下:

但后来我才知道,这种电源并连线实际上是可以在网络上直接买的。但是自己焊接可以满足自己的全部需求,不会受到长度和公母头的影响而变得被动。
电池与分电板转接线
根据分电板说明书的“温馨提示”:主电源线建议焊接AS150插头,分为左边正负一路和右边正负一路,不可混接。 可以知道,分电板一端是AS150插头。故此,电池与分电板转接线应该是XT60转AS150。
其中,AS150是目前RM并不常见的接头。其具体形态如下:

它的插头很大,卡得很紧,线也很粗。能够通过75A的大电流,因此很适合我们的无人机动力系统方案。
我们采购的Amass的锂电池连接器AS150U短包胶有三条线,中间一条黑色的是数据线。我们仅将其作为供电接线,因此这条黑色的数据线没有用,可以直接剪掉。
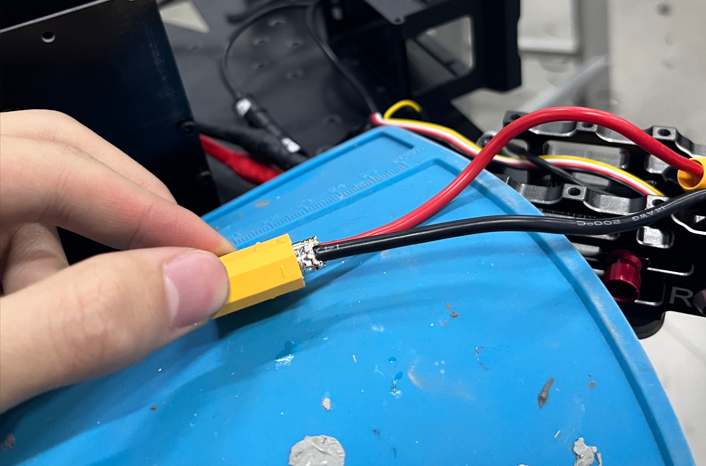
而需要焊接的部分是这条线和12AWG且一端焊接的是XT60母头的线进行连接。
其具体实现的形态还是可以通过这张图看出来:
分电板延长线
分电板引出的线是没有带接头的。因此,要把AS150的另外一个接头焊在上面。理论上,应该焊接的是AS150的公头。
这样一来,主电源线就已经焊接完成。
电机电源线
天行者一号的机体设计是通过管夹连接机臂和机身。这意味着,电机的电源线和所有信号线需要穿过管夹的留空深入机体内部再从内部的空隙处穿出来。信号线还好说,头很小,可以穿。但是,一旦电机的电源线接头XT90被焊上了之后,就根本穿不过管夹了。
因此,对于电机电源线接口的焊接,需要先将无接口的线穿过管夹,提拉到空隙的外面,再在无人机的机体上进行焊接。
完成之后,将电机的XT90口接上分电板,整体的电源总线就已经完成。
控制系统电源走线
控制系统分为两个相对独立的部分:
飞控系统
云台系统
而这两个部分都需要通过RM官方的电源管理模块来控制。因此,
飞控系统电源走线
(未完成)