无人机 | 2024年电控技术方案——飞手经验技术方案
飞手经验技术方案
对于飞自己研制的无人机的飞手,其心境与普通飞手有着很大的差别。首先,自研无人机在稳定性,控制方式等方面和已经在市场上流通的广大无人机相比,有着很大的差别;其次,自研无人机和研制它的飞手之间有很强的情感纽带,飞手在飞的时候会小心翼翼。
不过,往往是这样,由于飞手对自己研制的无人机了解非常透彻,因此它的一些基础特性心中了然,因此能够比较快地掌握它的飞行特性,从而将飞行控制达到一个很高的水准,甚至能够完成人机合一。而这台无人机放到别人手上,说不定就没有这样的效果了。
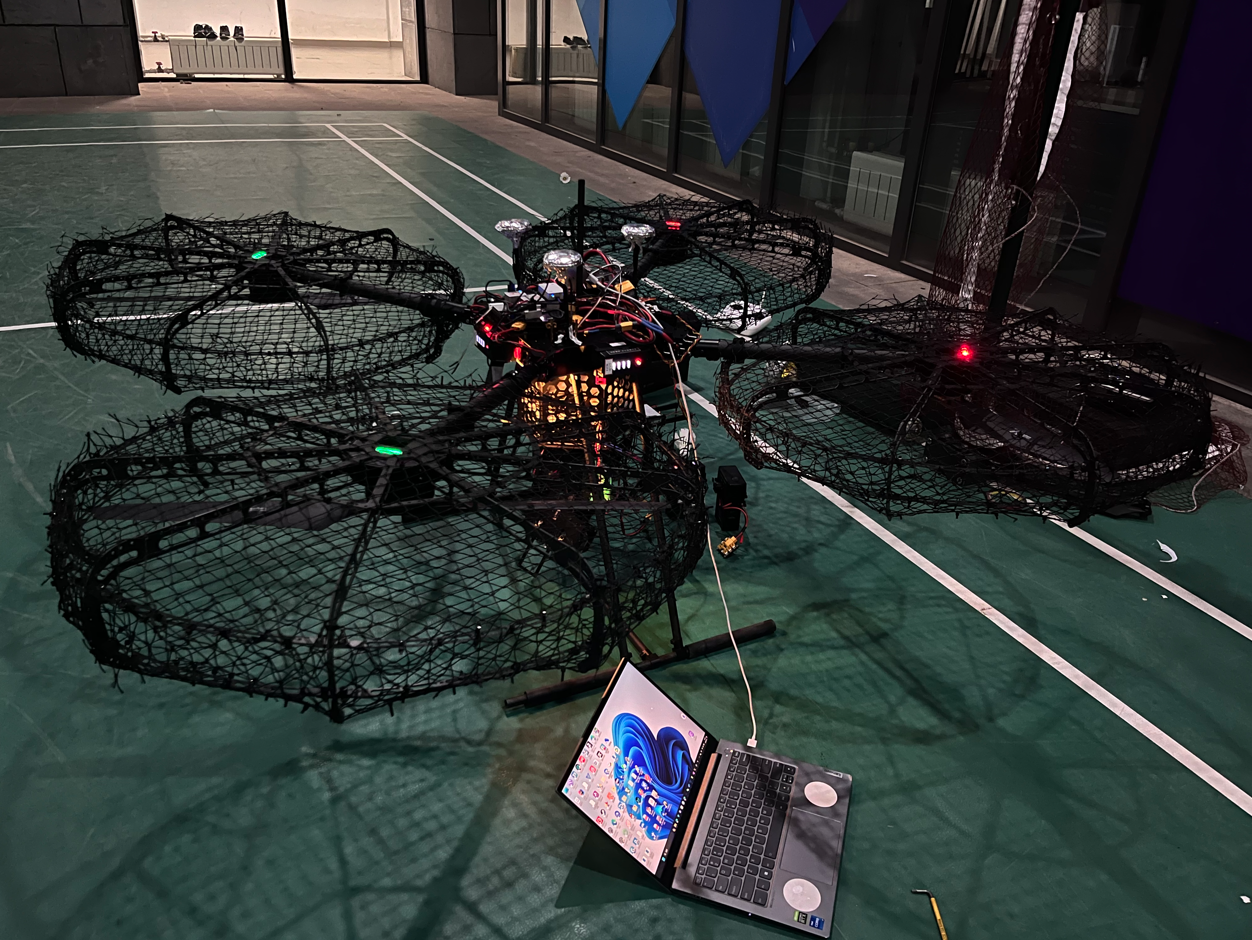
天行者一号的试飞曾经经历过失败。但是相较于去年死在娘胎里的M600 Pro,它的试飞无疑是及其成功的。
天行者一号成功完成了为其一周的压力测试,经过了三个学校飞手的检验,没有出现什么大的问题,但是确实也出现了一些小问题。从飞手的角度来说,它与飞手的配合是很完美的了。
下一面,我将详述一些飞手需要了解的基本知识,以及作为天行者一号的飞手所需的经验介绍。
遥控器手法
遥控器的手法分为三种:美国手,日本手,中国手。这三者的选择,取决于飞手个人习惯。
美国手
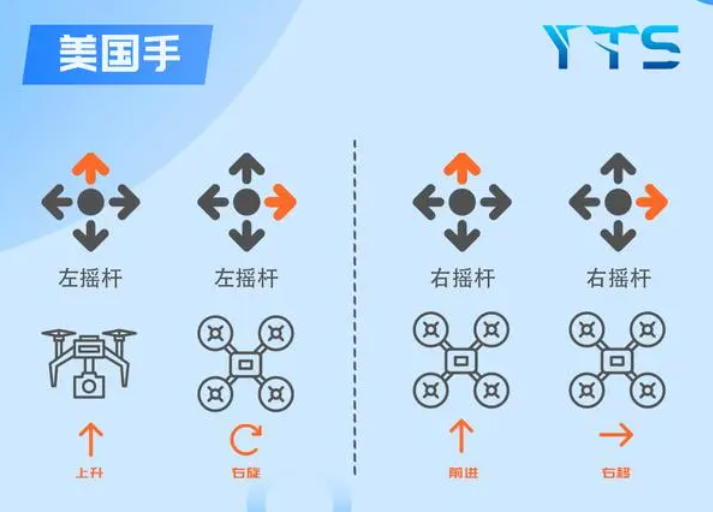
所谓的“美国手”,指的就是遥控器的左摇杆控制无人机的上升下降、顺时针/逆时针旋转;右摇杆控制无人机的向前向后、向左向右水平飞行。由于早期使用这种操作模式的航模玩家主要集中在美国,因此被称为“美国手”。
日本手
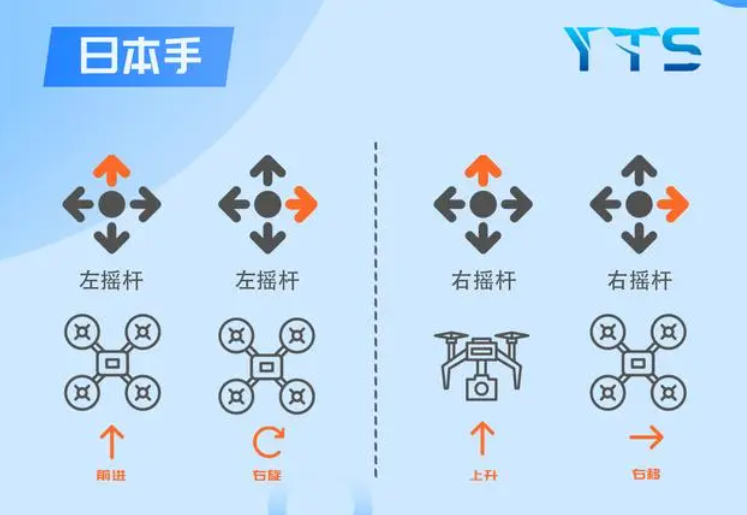
日本手与美国手的区别并不大,只是将控制无人机上升下降与前进后退进行了对调。即左摇杆杆负责无人机的前进后退、原地顺时针/逆时针旋转;遥控器的右摇杆,负责无人机的上升下降和左右移动。
中国手
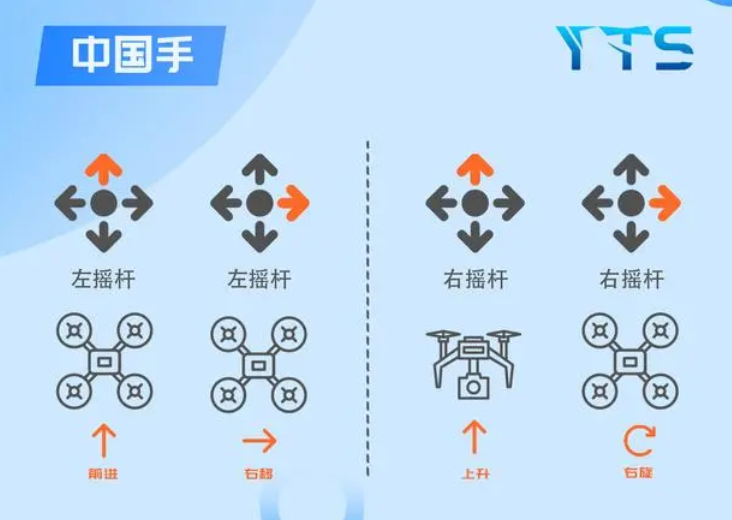
所谓“中国手”,就是遥控器的左摇杆控制无人机的向前向后、向左向右飞行;遥控器的右摇杆控制无人机的上升下降、顺时针/逆时针旋转。
一般来说,用中国手的人很少。中国手又称为玩具手,一般是中国的航模玩具中使用的。但是它在RM的遥控器上经常被使用。因此,我们在最开始的时候,使用的是中国手。飞手考核的过程中,也是使用中国手完成考核的。
后来首师根据飞手习惯,改成了美国手来做实验。因此,后续的很小一部分,是通过美国手来完成的。只要适应了,就不会有问题。
飞手经验
起飞
遥控器内八解锁,等待怠速稳定之后,向上拨动油门摇杆起飞,无需拨动太多,大概到中间位置就可以。在有需要的情况下,再进行微调。
悬停
由于地面效应,或者空间过于密闭,受到墙壁阻挡形成涡流的影响,或者是Guidance功能寄了,都会导致无人机在空中悬停的稳定性不好,从而开始飘。这个时候,需要拨动左右移动,上下移动的拨杆,进行微调。
直飞
直飞的要求一定是确保机头超前。机头如果有一定的偏转,就会出现走不直的情况。当走不直的时候,就需要通过一些微操来进行调整姿态。
降落
降落尤为关键。它的操作方式只有一个:将油门拉到底,保持不动。任何内八,外八的急停模式,都会导致炸机!

目前,天行者一号的降落分为两个部分。首先,无人机必须接触地面之后,进入怠速状态。然后要保持油门最低大概一秒后,电机才会关停。在此期间,千万不能松手!
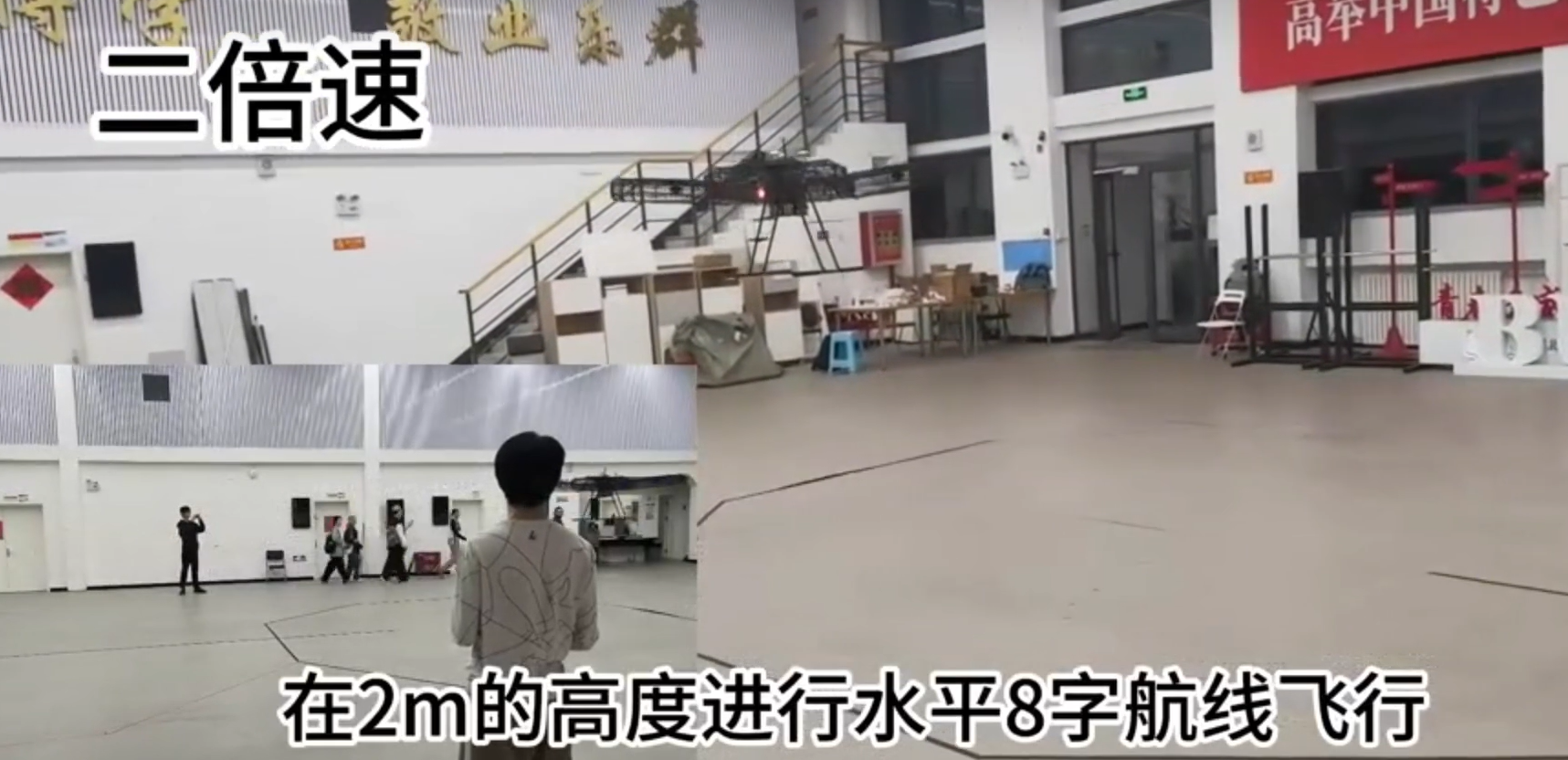
八字绕飞
这是飞手考核中最困难的一个,也是让无数无人机炸机的一个项目。最大的问题,就是对无人机绕环半径的把控不准。
为了解决这个问题,本次飞手考核,我们在地面上贴了两个八边形的标记。并且在无人机的弹舱上绑一个向下的激光笔。这样,只要让激光笔在八边形圈内走,就可以掌控好它的半径。

虽然有了标志物,但依旧需要飞手进行掌控。经常,无人机的半径会越飞越大,这是因为对无人机的前进和自旋的分配比掌握的不好。一定要记住一件事儿:多转少走。自旋的多一些,前进的少一些,就能飞出比较好的半径了。