无人机 | 2024年电控技术方案——飞控系统技术方案
飞控系统技术方案
天行者一号使用的飞控为大疆的DJI A3 Pro,是大疆M600 Pro上卸下来的飞控。它其实是一个有一定年头的飞控系统了,一个是模块年代较早,第二个是集成度太高无法深入底层。但是对于Robomaster来说,兼容性还是很强的。
飞控系统的主体是A3 Pro+Guidance组合,两者通过CAN-BUS通信,可以满足其定高的需求。
A3 Pro简介
A3 Pro具体介绍可以去大疆的官网下载它的官方说明书,详情请点击此处 A3/A3PRO 用户手册 肯定比从这里看有用。但是出于自行整理和读者快速获取信息的角度考虑,我在这里进行简单的信息汇总。
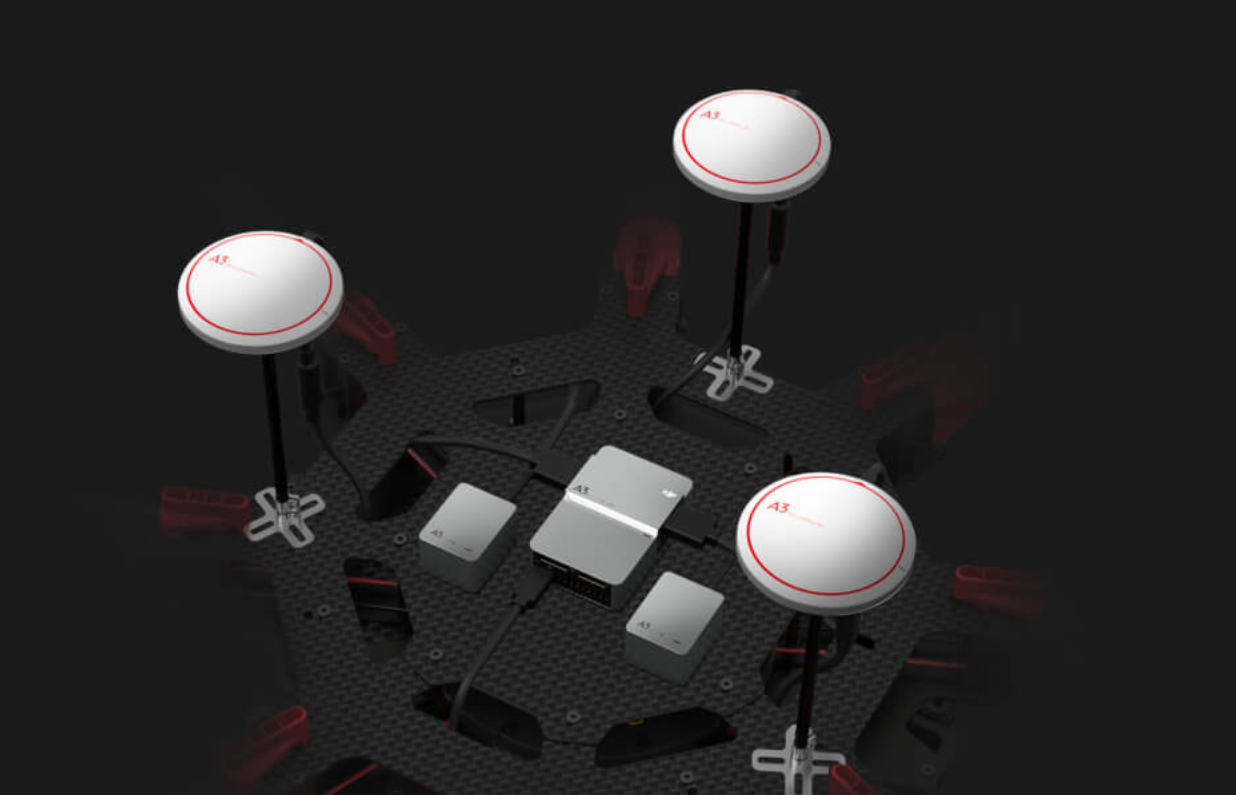
A3 Pro的模块及布局
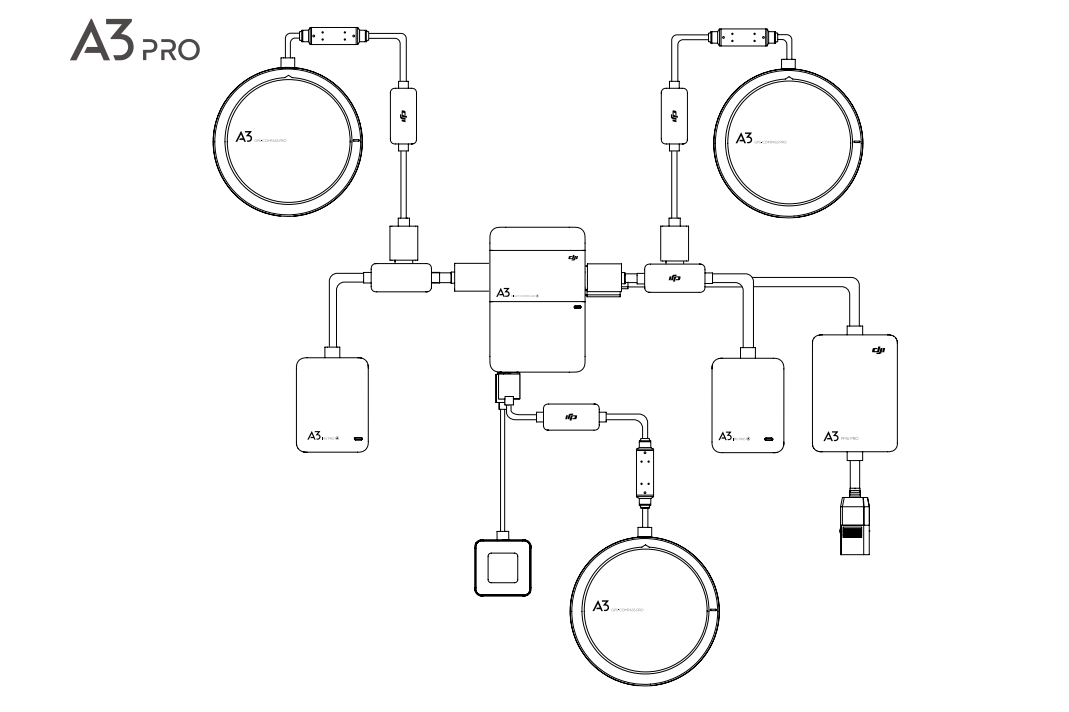 上方是A3 Pro的所有模块及其布局图,我将根据上方的模块进行简要的介绍。一些日常容易理解的模块我就不再赘述。
上方是A3 Pro的所有模块及其布局图,我将根据上方的模块进行简要的介绍。一些日常容易理解的模块我就不再赘述。
主控器FC
也就是俗称的飞控的主控,位于上方图像的正中间,有一个明显的突起,且在下方有指示灯。它是所有外设的中枢,上面有诸多的接口。它有许多的多功能PWM输入引脚,可以外接很多的外设,诸如起落架一类。但是目前我们还没有用到。
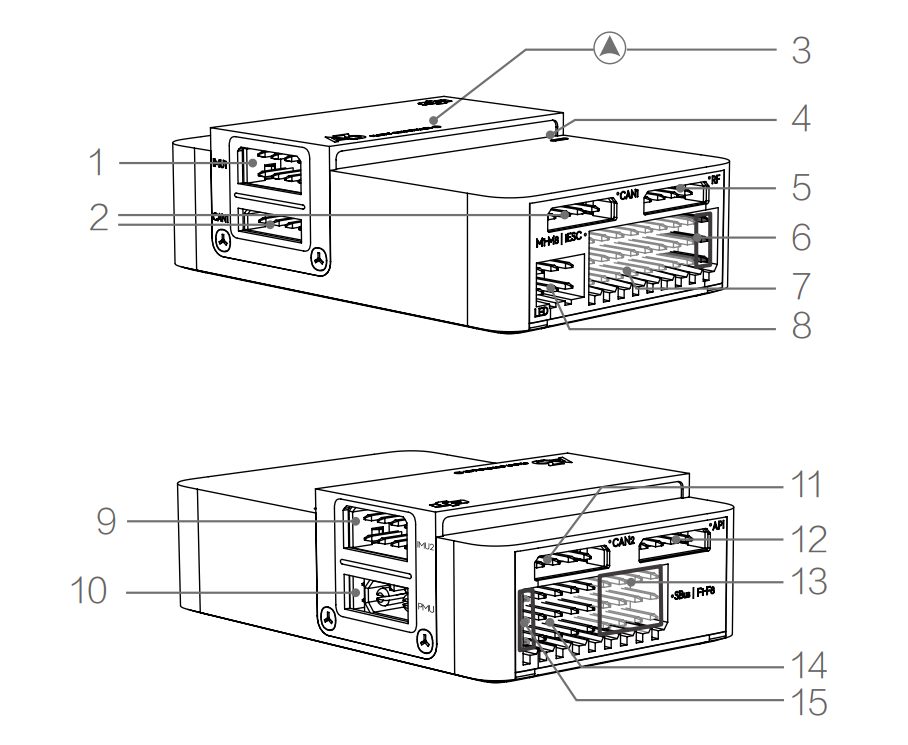
我将就天行者一号的现有方案,来介绍运用到的接口。
1号口,连接IMU1
2号口,连接两路GPS-Compass Pro,剩下的一路GPS-Compass Pro连接在另外一路GPS-Compass Pro的CAN1扩展接口上
7号口,连接四个电机的PWM信号线,注意,从M1-M4,从左至右
8号口,连接LED模块,该LED模块为无人机状态指示灯,所有报错都从这里看
9号口,连接IMU2
10号口,连接PMU模块,为9V 3A的接口
11号口,连接Guidance视觉传感系统
15号口,连接遥控器的接收机(S-BUS)
PMU模块
PMU(Power Managerment Unit)中文成为电源管理单元,可以将其视作是RM的电源管理模块,只是作用不尽相同。
1号口,连接主控
2号口,iBAT预留接口
3号口,锂电池接口
1号口是PMU的电源输出,亦即主控器FC的电源输入。3号口是3S-12S的锂电池接口。这直接意味着整个A3 Pro飞控的电源电压范围,在3S到12S之间。而我们分电板选型后的电压输出是6S和12S,符合需求。
这里的3号接口,将会被连接在分电板上。天行者一号上,3号口是连接在分电板的12S输出口上的。至于为什么选择12S的口,我会在后文讲述。
这里的1号接口,将会给主控器FC送去9V 3A的输入。因此我们可以得出电源管理单元PMU的主要功能:作为一个理想的降压模块和稳压模块。
至于2号口,被称为iBAT预留接口,在天行者一号中并没有使用到。我将在 无人机 | A3 PRO 外设进阶 上详细阐述,需要请查阅。
LED模块
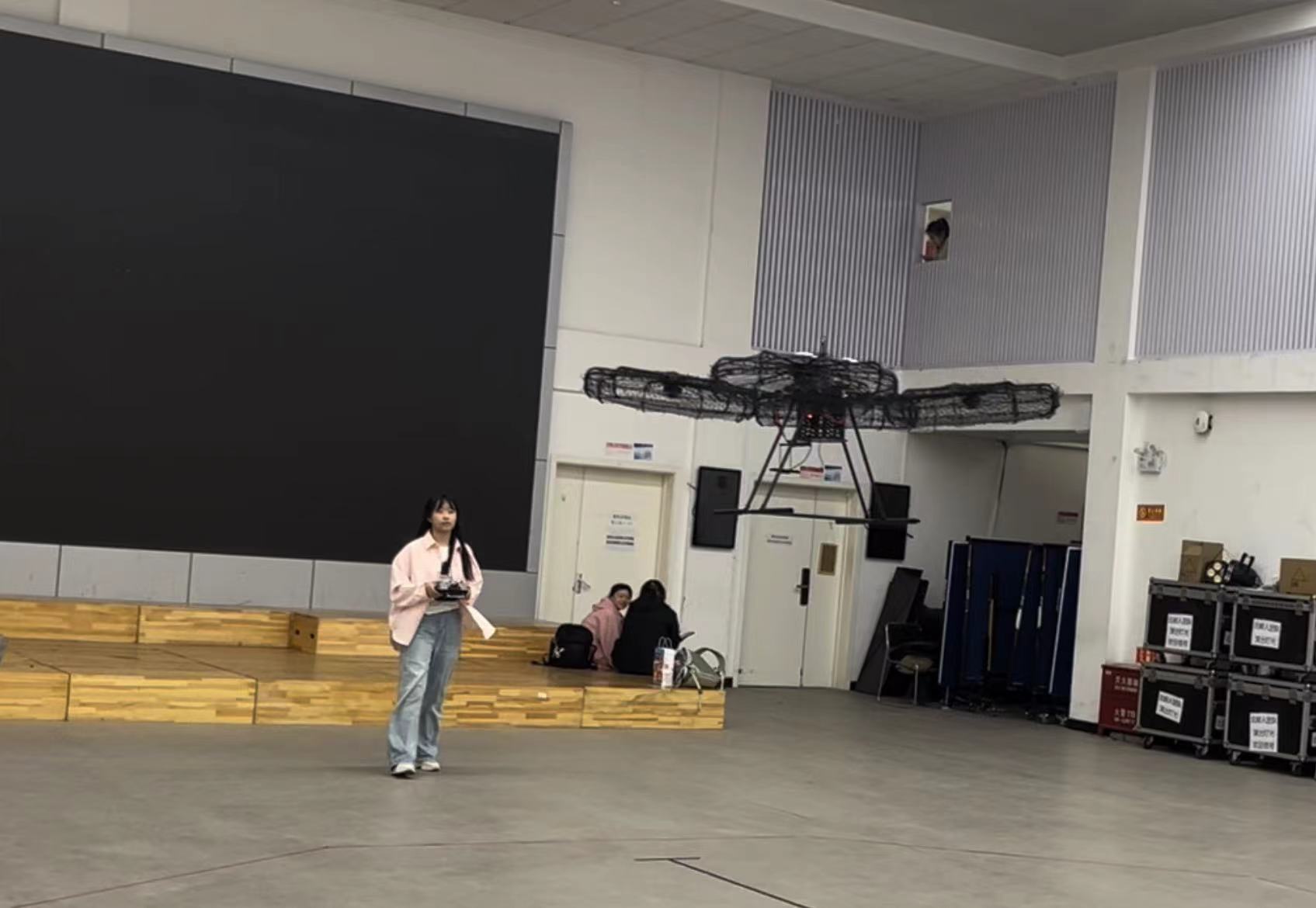
LED模块是不可或缺的。但要注意的是,LED模块不可当作灯条,因为它起到的是反应无人机当前状态的设备。天行者一号上,LED模块挂在其尾部,以方便飞手随时监控无人机的飞行状态。
在LED模块的下方有一个Micro USB的接口,这是A3 Pro和电脑通信的唯一途径(调参唯一的途径),必须要选择一条数据线而非充电线来连接,且该线需要长一些,否则调参的时候必须趴在无人机底下。
在与A3 PRO通信和供电的那一条线的旁边,还有一条Micro USB的线,目前我并不知道这条线是干什么的。同时,天行者一号目前用不上。
A3 Pro的实机布局
在A3 Pro的每一个模块上,都有一个小标识。这个标识是一个方向标,表明机头的方向。这意味着,有标识的模块都必须有严格的朝向。
整体下来,除了PMU,其他的几个模块,FC,IMU,GPS,都是有严格朝向的。因此,需要对所有的模块进行合理规则的摆放。
摆放的位置,设置在分电板上,这是为了能够更方便的布线。同时,分电板上也有一个机头朝向指向标,和飞控的方向是相同的。
根据研究,天行者一号的布局如图:
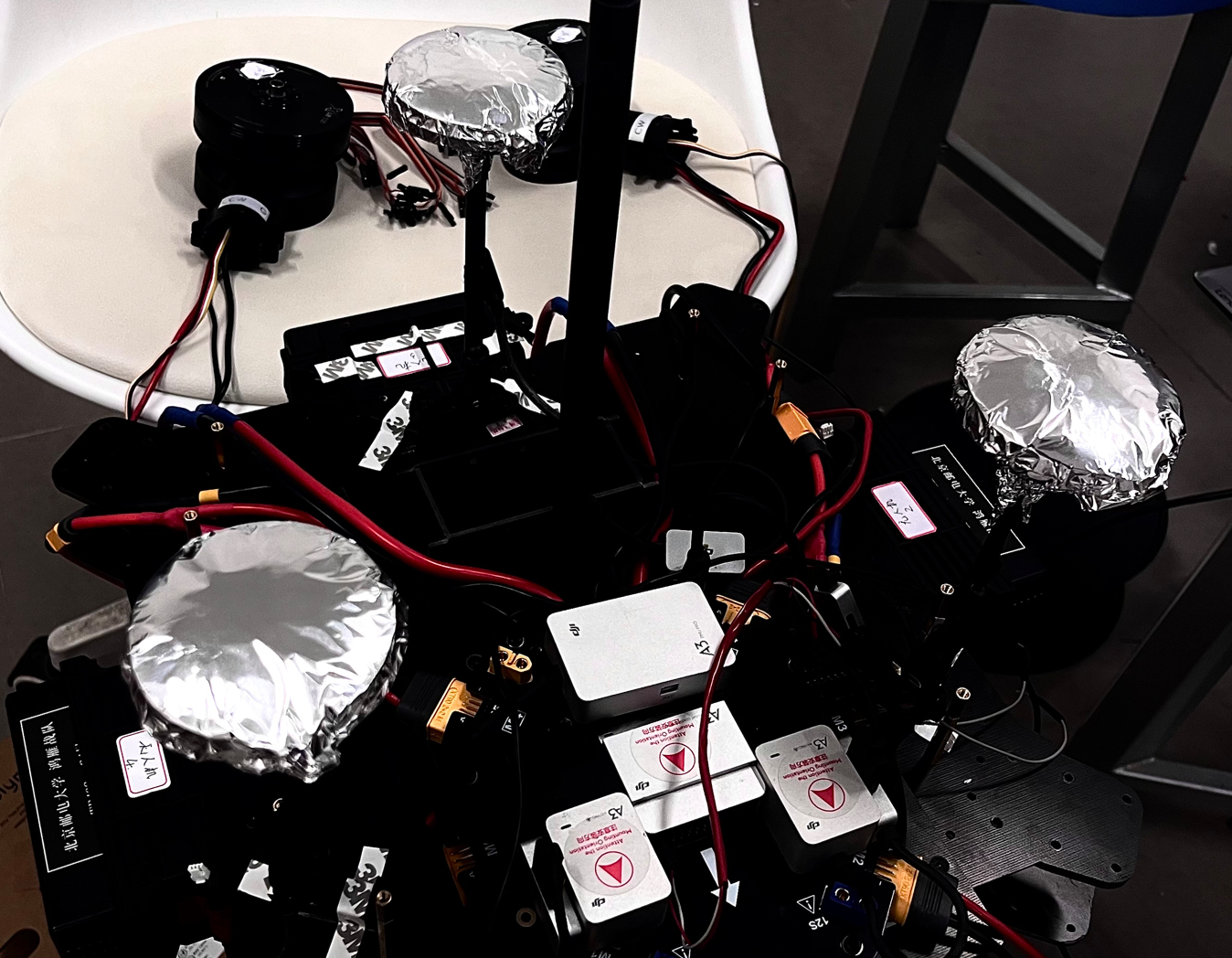
简单描述如下:
GPS部分沿用M600 Pro的方案,采用支架,面向无人机头部,呈现倒三角
PMU置于主控FC之上,横过来放置,中间用其配备的散热板,将两者隔离开来
IMU分布于主控FC的两侧,朝向相同
以上,就是关于A3 Pro的所有硬件部分的内容。
Guidance简介
Guidance是一套为智能导航系统提供参考信息的传感器系统,它综合利用了超声波传感器以及摄像头实时感知三维立体环境,为载体提供速度、位置及障碍物距离观测信息,搭载了该系统的无人机将具备无GPS情况下的悬停和障碍物感知功能。
当Guidance和A3 Pro成功连接并正常工作后,LED模块将会绿灯双闪,这是我们最希望看到的指示灯。
具体的Guidance详细内容,请参阅说明书 GUIDANCE 用户手册 。
Guidance模块及布局
一个正常完整的Guidance系统,拥有五方向传感器,分别是:前,后,左,右,下。其主控位于所有传感器的正中间。
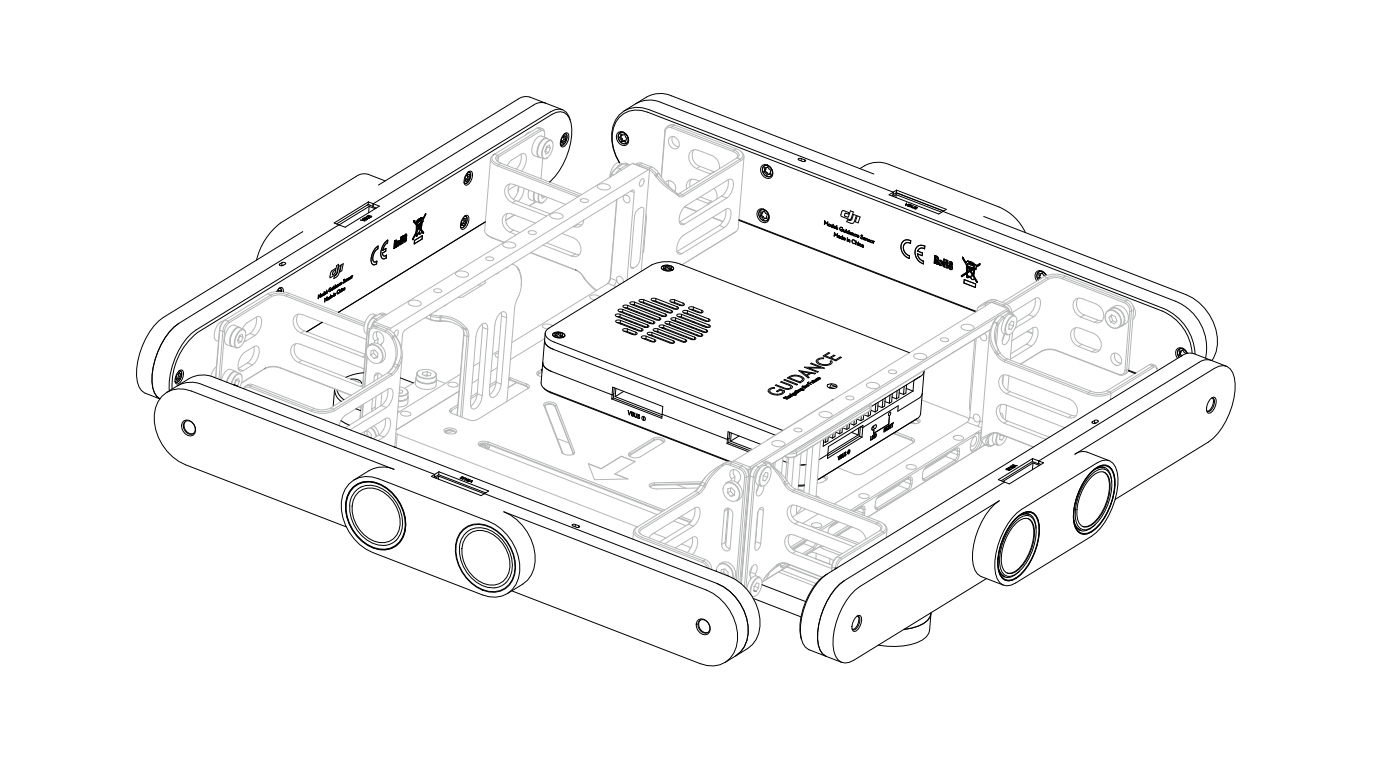
但是天行者一号需要Guidance的作用,仅仅是让其能够稳定的定高飞行。因此,我们只需要用到下方的传感器就行。需要把从咸鱼上买来的整个系统架子拆开,再把所有模块都拆开,选择任意一个传感器模块和视觉处理模块模块即可。
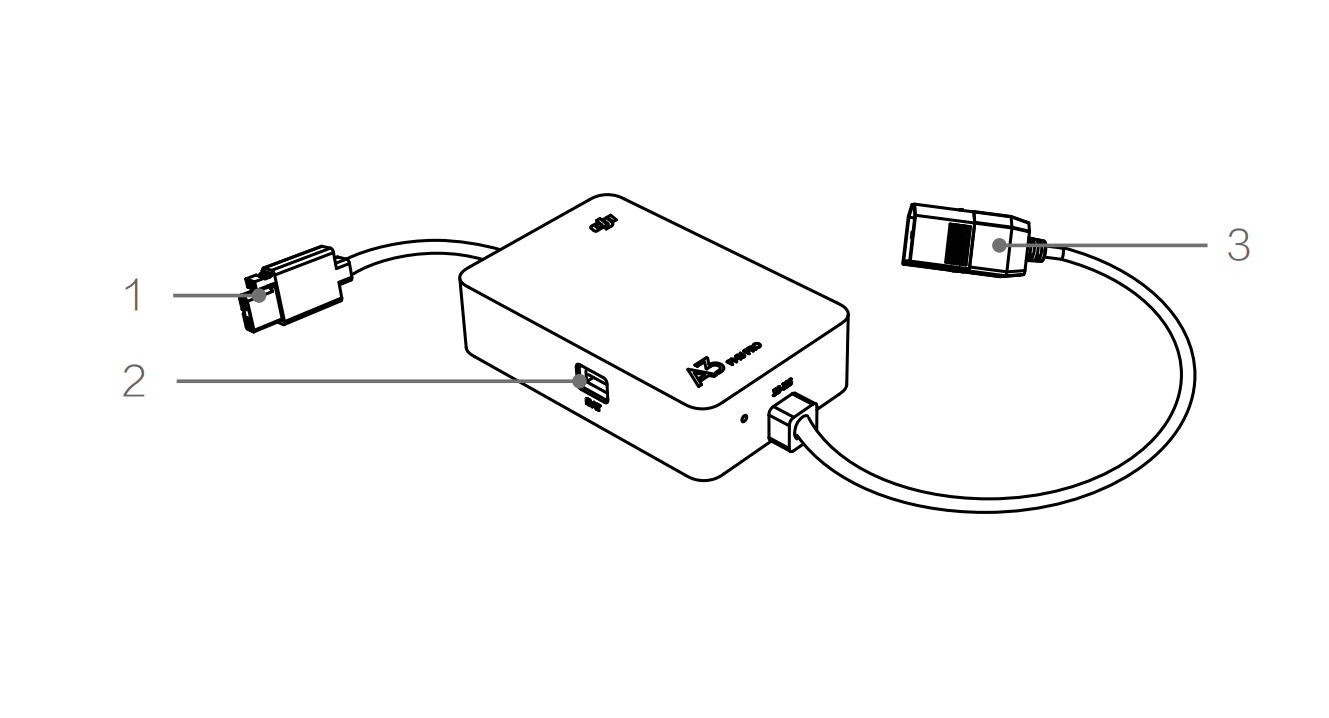
视觉处理模块
视觉处理模块连接视觉传感模块,接收图像、超声波等数据,经过计算处理后把得出的定位信息,通过CAN-BUS连接线传输给DJI飞控系统,或者通过USB/UART连接线传输给其他智能系统。
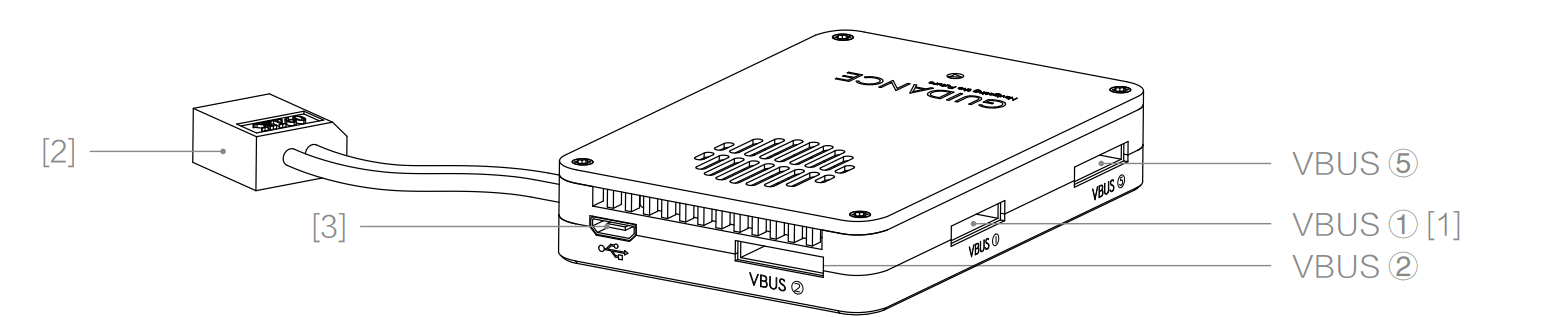
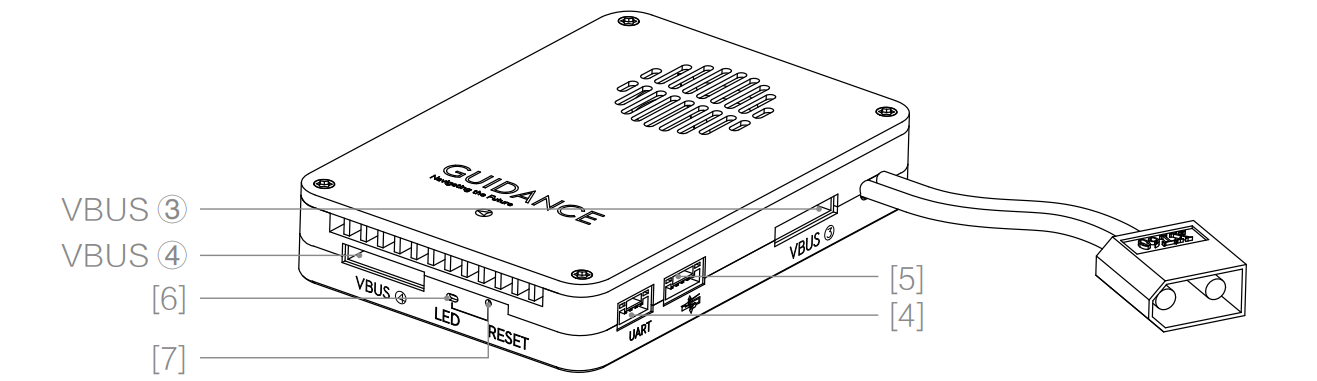
而目前我们只需要将Guidance与飞控相连,因此只需要用到CAN-BUS口。当然,Guidance从入门到入坟的最大难点就在于这个CAN-BUS怎么和A3 Pro接,因为第一点没有线,第二点没有官方的资料来告诉你确切的线序。因此,一时间成为了一个大难题。
好在,有学校的机架方案开源了,里面有Guidance线序连接的方案,这是一个好消息。这个开源方案详见RM论坛 【RM2019 空中机器人机架开源】 。
天行者一号的处理方式,在下文会详细介绍。
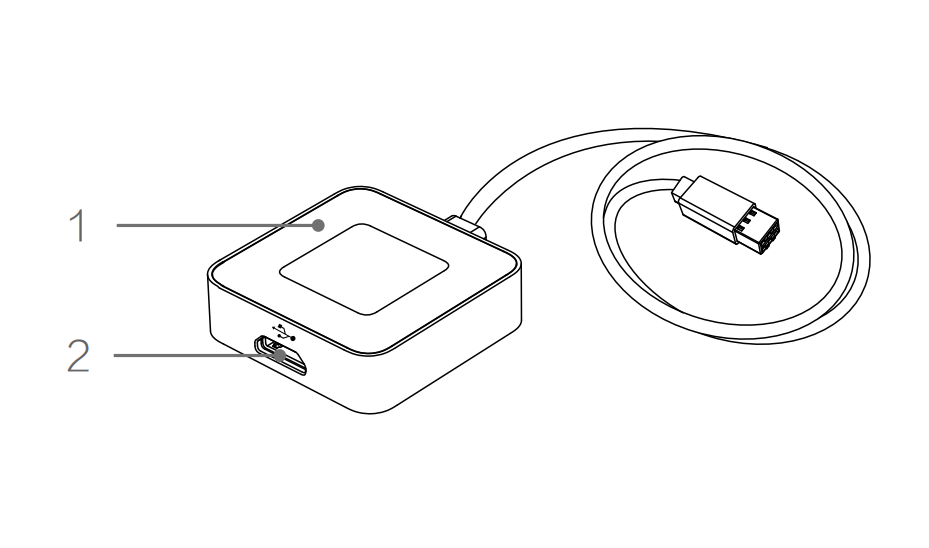
视觉传感模块
视觉传感模块就相对简单很多了,它是五个传感模块中的一个,天行者一号也只配备一个。
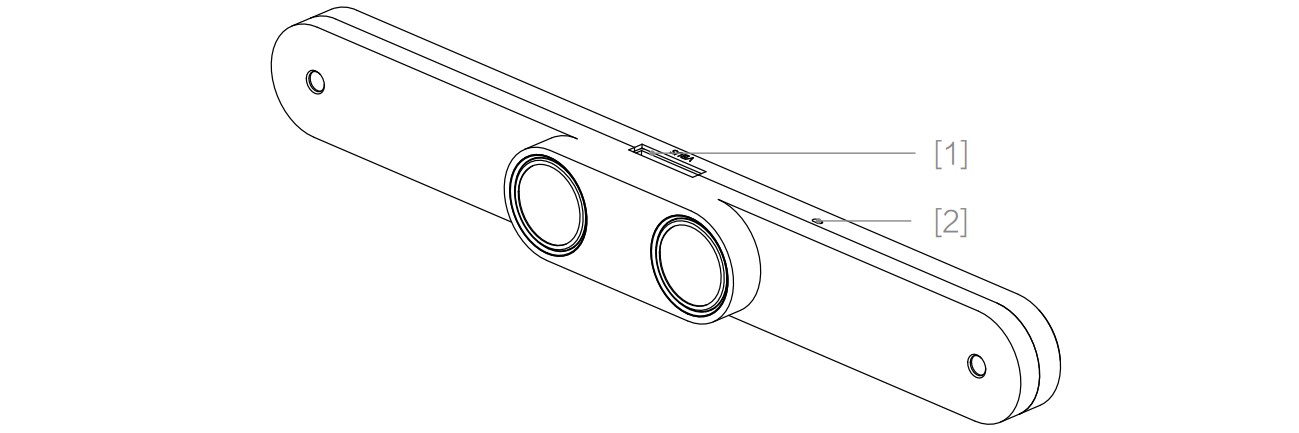
其中,有两个端口:
1号口,指示灯,反应当前模块状态
2号口,VBUS口,和视觉处理模块连接
整体的模块就介绍完了,下面就是最麻烦的接线问题。
Guidance接线方案
Guidance的接线看起来是很简单的,无非就两个部分:视觉传感模块和视觉处理模块的连接,以及视觉处理模块与A3 Pro的主控模块FC连接。但是都需要细心,因为有坑。
视觉传感模块 和 视觉处理模块连接
由于都是VBUS口,而五个VBUS口并不是等效的,因此不能连错。我们需要的是定高的定位功能,因此视觉传感模块应该朝下。
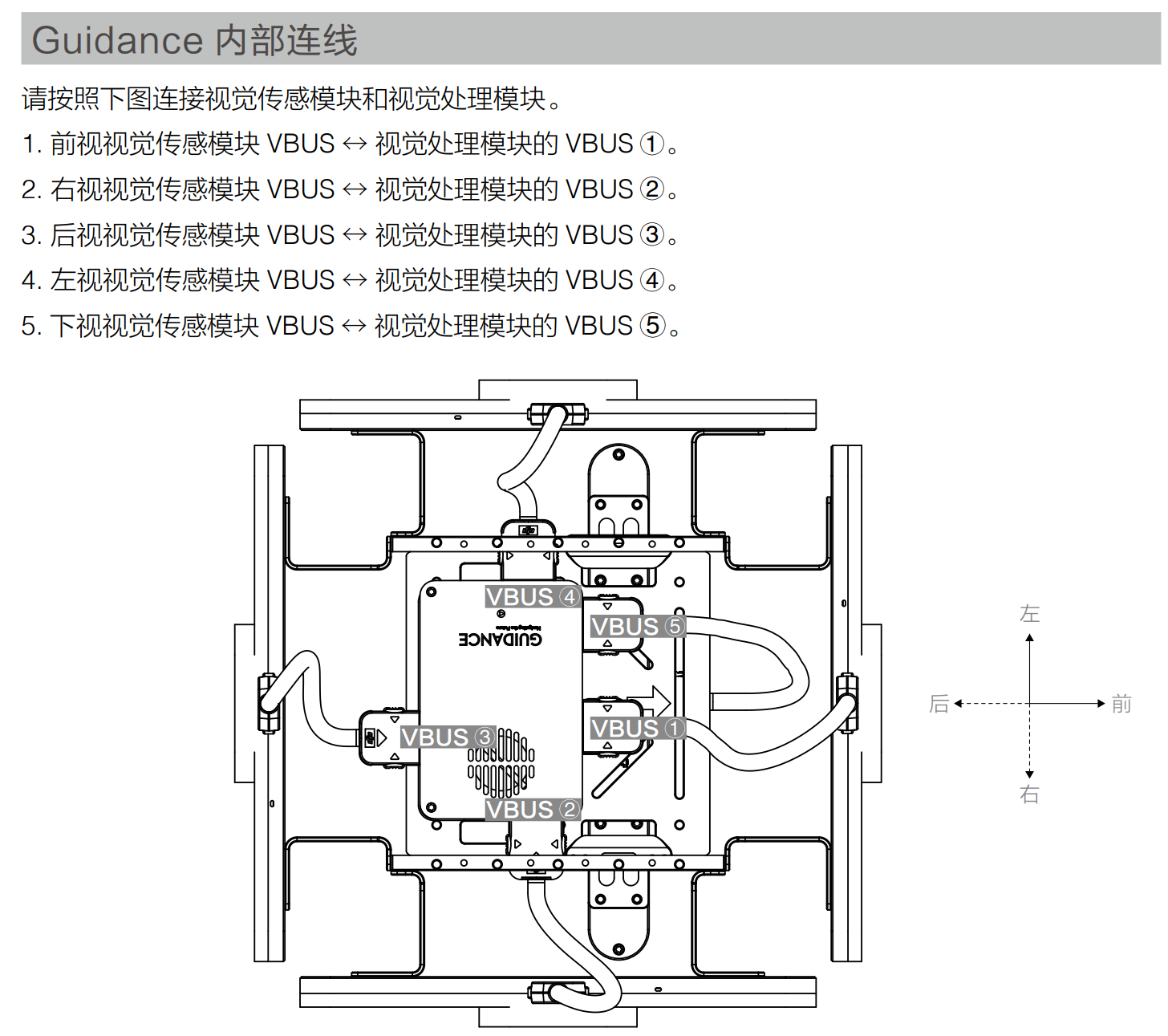
根据说明书,可以知道,下视视觉传感模块 VBS —视觉处理模块的VBUS 5。因此,天行者一号的视觉传感模块和视觉处理模块也是通过VBUS 5连接的。
视觉处理模块 和 飞控系统连接
前文已经提到,两个模块之间的连接需要通过CAN-BUS来完成。但是,Guidance的接头是GH1.25的,而A3 Pro上的接头是这一套系统自己的CAN-BUS头。因此,市面上找不到这样的线来买。同时,我们也没有多余的系统自己的CAN-BUS头来焊接。
我尝试了直接使用杜邦线母头,插入飞控的CAN-BUS口。能够实现,但是比较勉强。加上电工胶带固定,可以相对牢固。因此,这个方法可行。
但是,线序的处理是一大难题。需要反复通过比对,来完成线序。
Guidance系统的安装
有几个方面要注意:
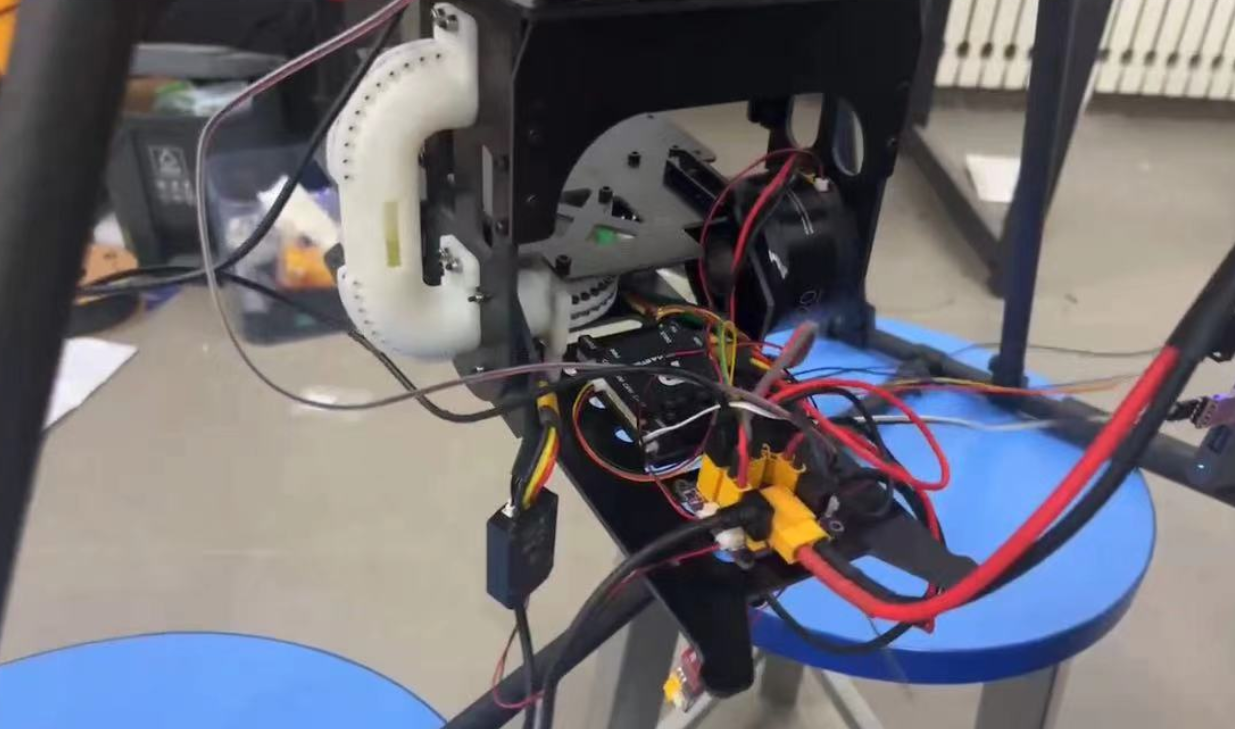
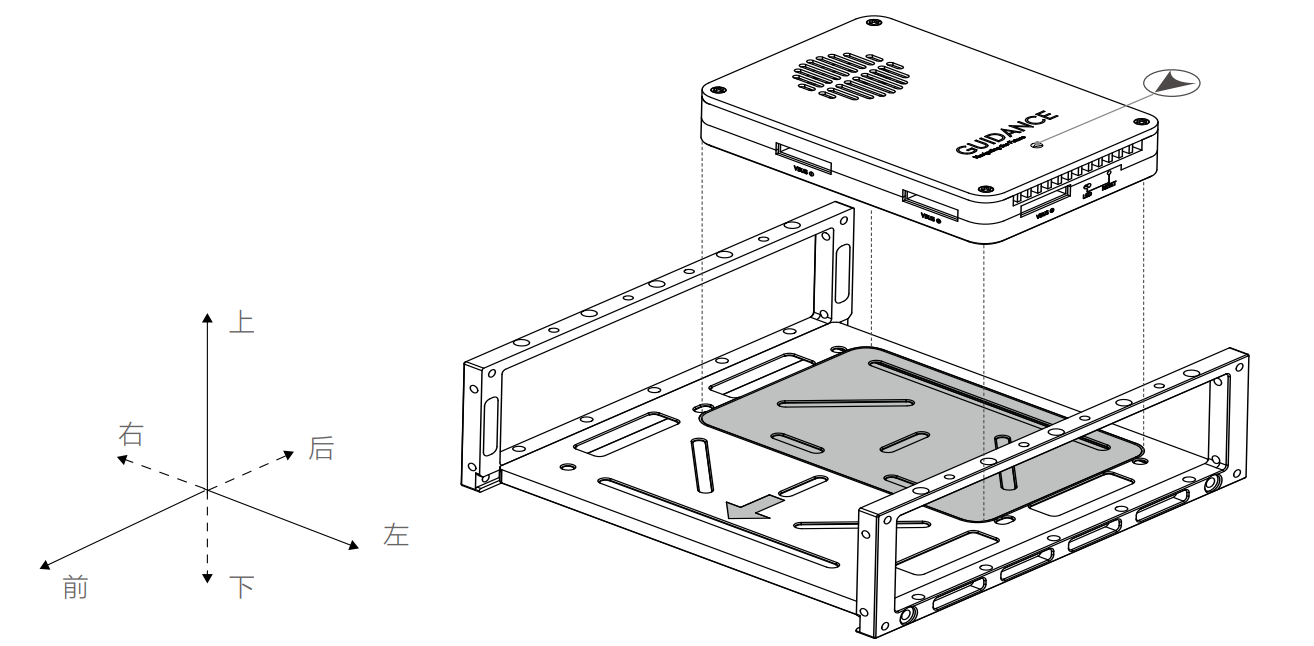
Guidance的视觉处理模块是有安装方向的
根据说明书上的提示,散热口要朝上,指示箭头在指向载具前方,如图所示。
Guidance的视觉传感模块要保持水平
由于安装因素,Guidance的视觉传感模块要保证水平,具体的安装方案请参照机械方面的技术文档。