试错集锦 | 无人机电源总线焊接错误导致近5000元损失
无人机电源总线焊接的严重错误之前的文章有提到过,天行者一号在制作研发的过程中有一次重大的失误。这个失误直接导致了严重的经济成本损失和时间成本浪费。诚然,研发过程不可能一帆风顺,万事万物都是曲折进步的。因此,大方承认失败,接受失败,承担责任,才是一个正确的科研心态。
试错成本
四块TB48S无人机电池烧毁严重,无法维修
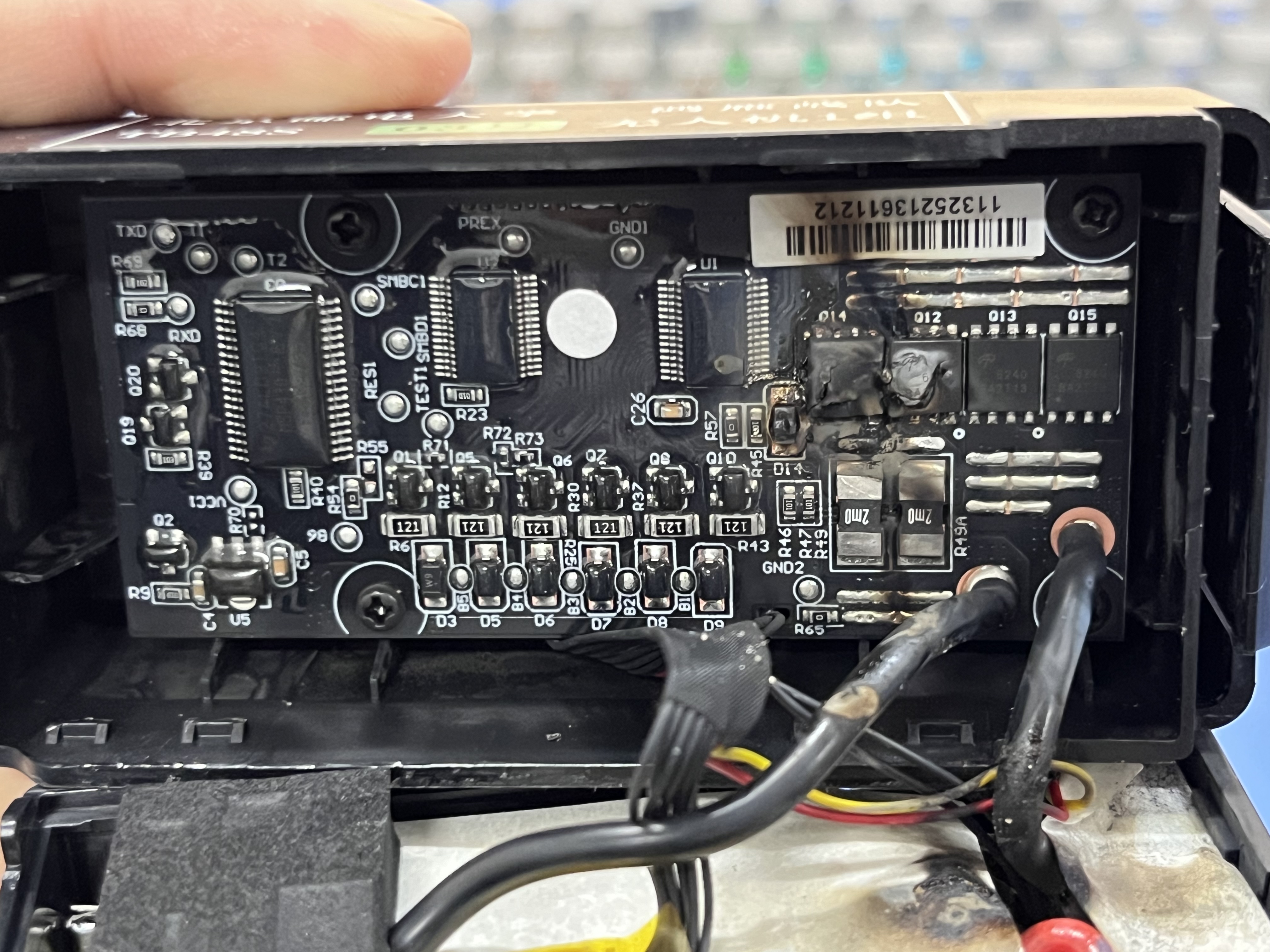
EFT分电板烧毁
XU8-X一只动力系统严重损坏,电调烧毁,电机烧毁
错误发生经过在2024年2月25日的凌晨3点,我已经完成了电机的上电测试,各方面都没有任何的问题。四个电机的LED正常亮灯,但是对于蜂鸣器的警报声并没有上心,也没有意识要去检查。
当我连接Datalink失败之后,关闭了电源。随后,我想重新启动无人机,试图重新连接Datalink,我请郝文燕来帮忙。当初的开关方式,是将四块电机在无人机机体外部开后,再右两人同时插进电池支架。
由于这种上电方法本身就有一定的风险,再加上我们的配合最初并不默契,导致四块电池没有同时插进去,即无人机上电不同时。
这个时候,发现无人机1号电池灭灯。在我们继续尝试启动无人机的时候,突然之间,在分电板处产生了电火花,以及尖锐 ...
无人机 | 2024年电控技术方案——飞手经验技术方案
飞手经验技术方案对于飞自己研制的无人机的飞手,其心境与普通飞手有着很大的差别。首先,自研无人机在稳定性,控制方式等方面和已经在市场上流通的广大无人机相比,有着很大的差别;其次,自研无人机和研制它的飞手之间有很强的情感纽带,飞手在飞的时候会小心翼翼。
不过,往往是这样,由于飞手对自己研制的无人机了解非常透彻,因此它的一些基础特性心中了然,因此能够比较快地掌握它的飞行特性,从而将飞行控制达到一个很高的水准,甚至能够完成人机合一。而这台无人机放到别人手上,说不定就没有这样的效果了。
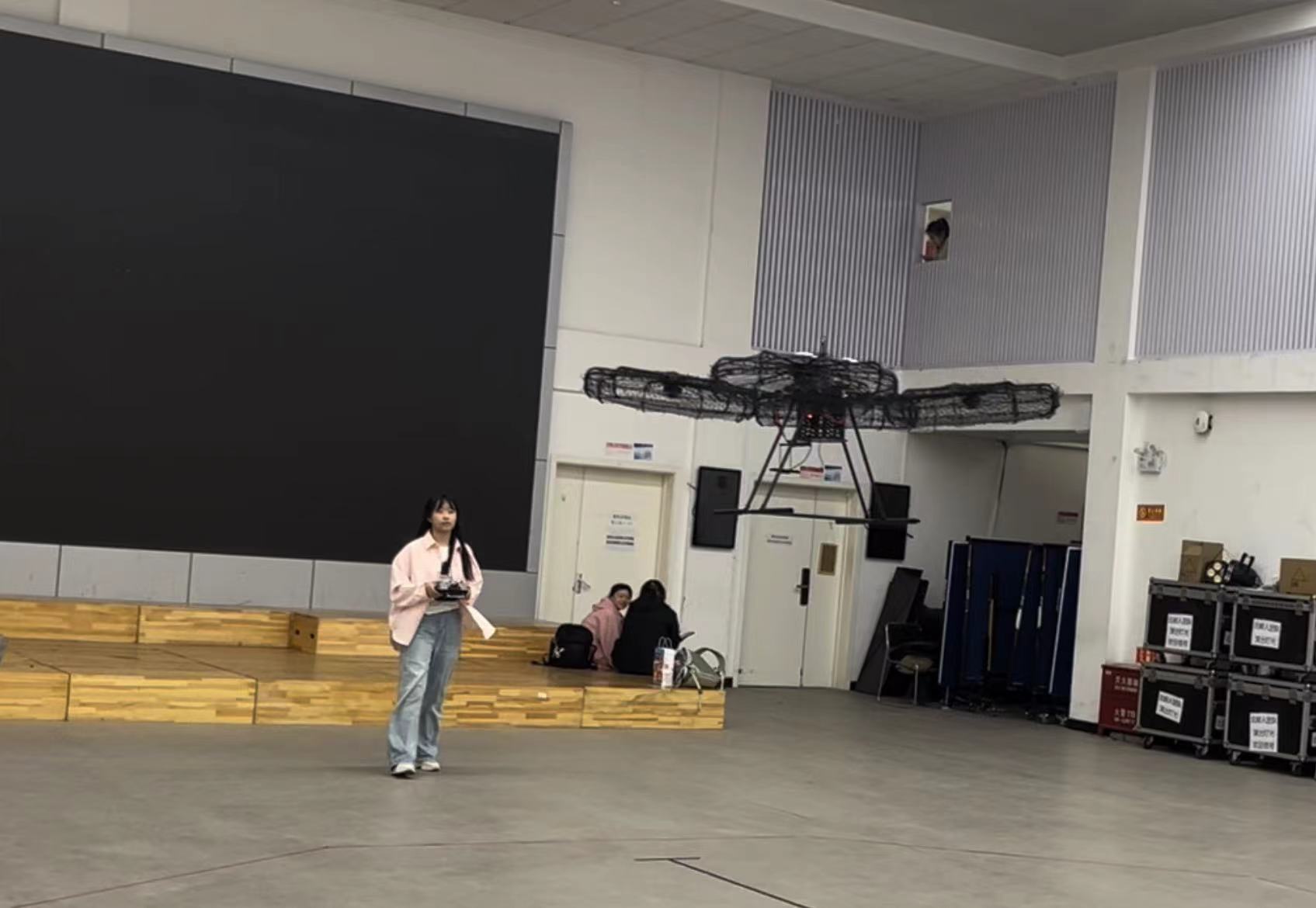
天行者一号的试飞曾经经历过失败。但是相较于去年死在娘胎里的M600 Pro,它的试飞无疑是及其成功的。
天行者一号成功完成了为其一周的压力测试,经过了三个学校飞手的检验,没有出现什么大的问题,但是确实也出现了一些小问题。从飞手的角度来说,它与飞手的配合是很完美的了。
下一面,我将详述一些飞手需要了解的基本知识,以及作为天行者一号的飞手所需的经验介绍。
遥控器手法遥控器的手法分为三种:美国手,日本手,中国手。这三者的选择,取决于飞手个人习惯。
美国手
所谓的“美国手”,指的就是遥控器的左摇杆控制无人机的上升下降、 ...
无人机 | 2024年电控技术方案——飞控系统技术方案
飞控系统技术方案天行者一号使用的飞控为大疆的DJI A3 Pro,是大疆M600 Pro上卸下来的飞控。它其实是一个有一定年头的飞控系统了,一个是模块年代较早,第二个是集成度太高无法深入底层。但是对于Robomaster来说,兼容性还是很强的。
飞控系统的主体是A3 Pro+Guidance组合,两者通过CAN-BUS通信,可以满足其定高的需求。
A3 Pro简介A3 Pro具体介绍可以去大疆的官网下载它的官方说明书,详情请点击此处 A3/A3PRO 用户手册 肯定比从这里看有用。但是出于自行整理和读者快速获取信息的角度考虑,我在这里进行简单的信息汇总。
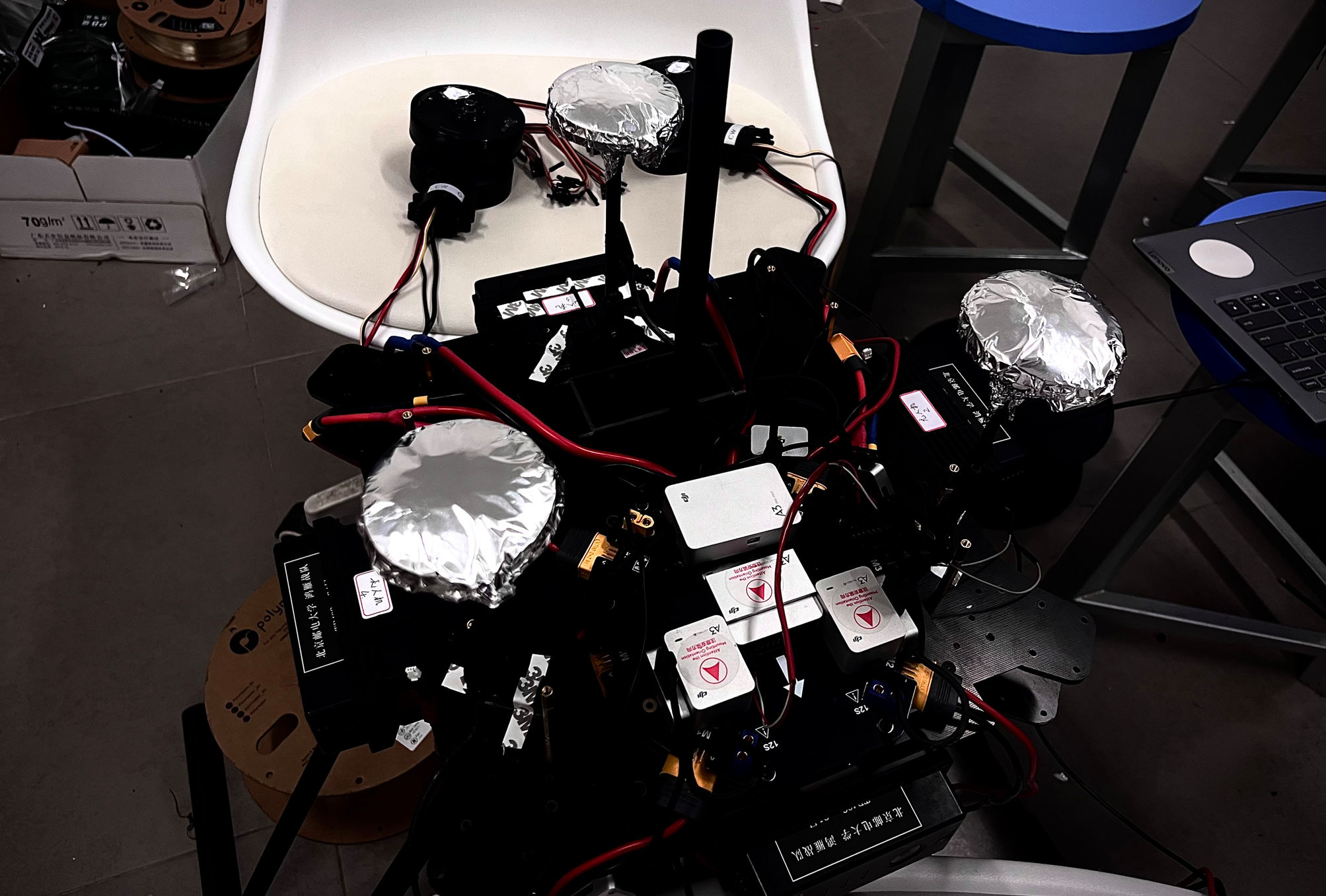
A3 Pro的模块及布局上方是A3 Pro的所有模块及其布局图,我将根据上方的模块进行简要的介绍。一些日常容易理解的模块我就不再赘述。
主控器FC
也就是俗称的飞控的主控,位于上方图像的正中间,有一个明显的突起,且在下方有指示灯。它是所有外设的中枢,上面有诸多的接口。它有许多的多功能PWM输入引脚,可以外接很多的外设,诸如起落架一类。但是目前我们还没有用到。
我将就天行者一号的现有方案,来介绍运用到的接口。
1号口,连接 ...

无人机 | 2024年电控技术方案——电源系统技术方案
电源系统技术方案无人机的供电系统由几个部分决定:
设备供电需求
分电板选择型号
供电电池组数
这三者之间是相互关联,相互限制的。少一个考虑的因素都不可以。
供电需求动力系统供电需求天行者一号采用的是T-Motor XU8-X一体化动力系统,是一个高电压需求,高电流需求,动力强大的动力系统。其供电电压需求为12S。
从我们的选型上看,XU8-X KV100,其最大电流为29.3A,最大功率为1400W,可以简单算以下:
U={P\over I}={1400W\over 29.3A}=47.8V所需电压即为47.8V, 需要12S电压供电。当然,其工作额定电压(Lipo)的具体数值也在表中体现了。
飞控系统供电需求天行者一号采用的是DJI A3 Pro+DJI Guiadance组合。两者的供电需求都是6S。同时,配备数据采集器Datalink,其供电需求同为6S
云台部分供电需求云台部分总供电为6S,再通过两块中心版分出电源线和信号线。
分电板选型根据上述三个部分的供电需求,我们选择了EFT无人机分电板。
这个型号的分电板有以下特征:
电调接口为XT90
电调接口为1 ...
无人机 | 2024年电控技术方案综述
2024年无人机电控技术方案综述写下无人机电控技术方案的时候,是2024年的5月1日,距离今年邀请赛长沙站还有24天的时间。从2月23日开始,到今日5月1日,无人机实现了从0到1的突破。再经过从4月22日到4月29日为期7天的压力测试,论证了电控的技术方案。
电控进度图
2024.2.23 A3 Pro 上电测试
2024.2.24 研究电池串联接线方式
2024.2.24 焊接分电板电源线
2024.2.24 电机与分电板于机体连接
2024.2.25 上电成功
2024.2.25 Datalink 尝试连接(失败)
2024.2.25 3:00 分电板烧毁,电机烧毁,电池烧毁
2024.2.26 云台调试(pitch轴)
2024.2.26 发射机构调试
2024.3.1 电机送修
2024.3.2 云台调试(yaw轴)
2024.3.16 焊接电池支架
2024.3.17 焊接新的串联电源线
2024.3.22 测试电源串联电路
2024.3.23 ...

无人机 | 三个学校压力测试后的问题反馈
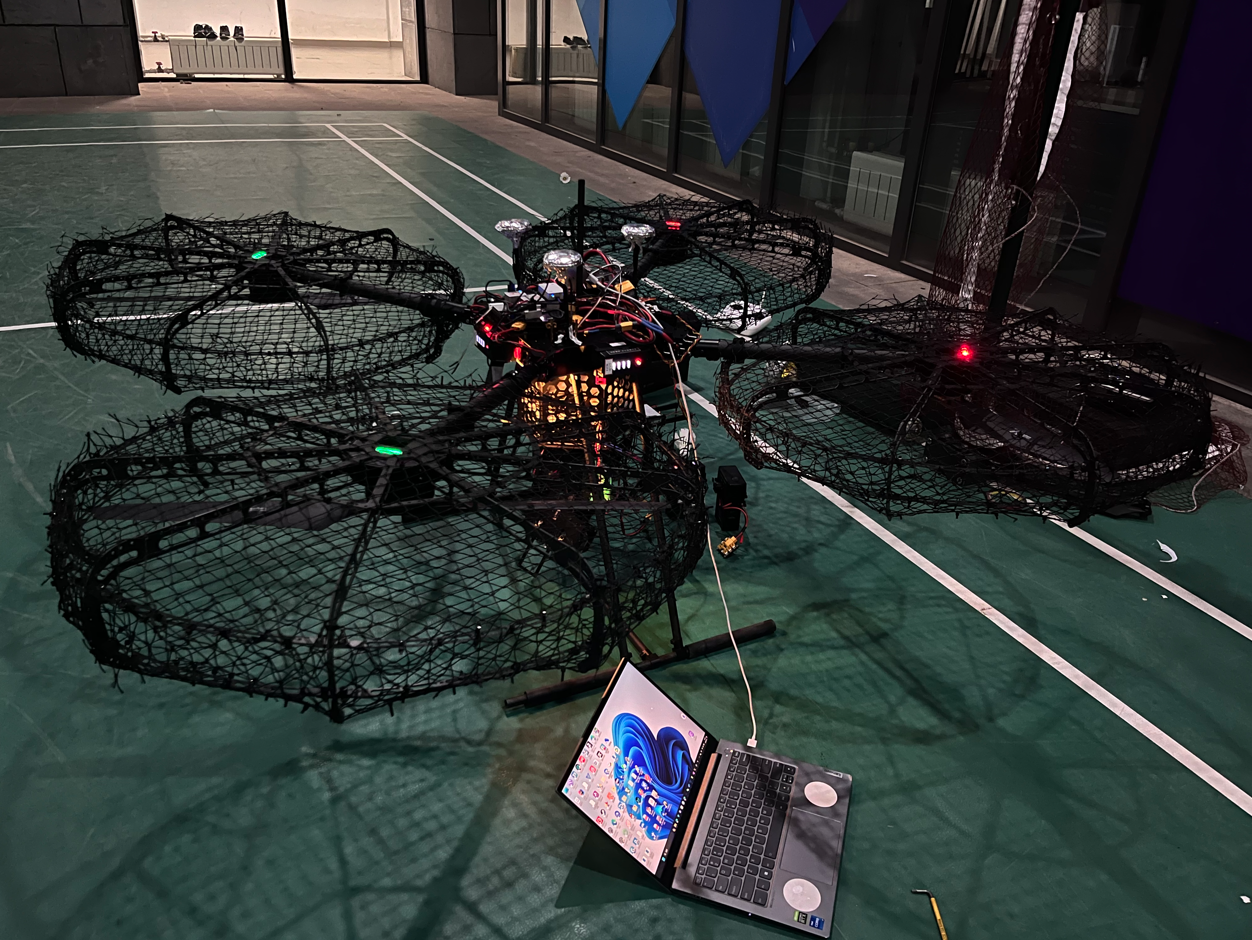
天行者1号经过了为期一周的压力测试。在4月30号需要提交飞手考核材料,北邮飞手我和郝文燕都已经拍摄完了相应的视频内容。同时,受托于首都师范大学和北京科技大学的飞手 ,我们的场地和无人机也借给他们使用,拍摄他们的考核视频。整体连续一周的压力测试,效果优秀,电池,电路,动力系统并未出现损坏现象。唯一的一点问题是起落架的一根管子可能在搬运的时候断了一半。
队长对以上一周的压力测试进行了总结,总结内容如下:
问题
Guidance 的 CAN BUS 线稳定性过低,需要单独买A3/N3系列的特殊 CAN 线自制线材;另外 Guidance 端的 5pin gh1.25 接头也废了,得买一个质量好点的接头
整机线材长度、排布过于混乱,目前觉得很有可能飞行过程中的大电流也会干扰 GPS IMU 甚至其他信号传输,北科说去年有学校给飞控做了一个法拉第笼,反馈效果很好,你们可以研究下
无人机支架因为未知因素断裂,考虑下有没有其他加固方案。
无人机的 GPS 模块位置数据也未标定,疑似因此导致指南针时常出问题
教训
电池安装后必须检查是否查稳两个卡扣,今天其中一次飞行途中三号电池直接离舱离开 ...
无人机SLAM工作日志
imu传感器IM648在ubuntu22.04上的蓝牙配对之前购买的imu传感器BWT901BLE无法和电脑进行蓝牙连接,并且无法在Ubuntu里跑ros例程。因此,购买了新的imu传感器IM648。IM648可以将数据发送给node节点并且能将节点数据作为消息发送给ROS主题。IM648的蓝牙通信是基于GATT协议完成的。因此,需要在Ubuntu上实现GATT协议通信。
在Windows上打开IM648的GUI操作界面查看其MAC号在windows系统中打开bluez_imu文件夹,打开可执行文件IMU_2.33_Release.exe。可以看到如下的GUI界面。
此时,打开IM648的蓝牙按钮,看到蓝灯间隔一段时间闪烁一次。
点击配对
这个时候,可以看到右侧的出现了MAC号,我们的设备是83:9A:92:AF:20:DE。
对于MAC地址,这是一个硬件固有的地址,不会随着端口或者链接设备的改变而改变。在GATT协议里应该是作为发送数据包的一部分而存在的。
在Ubuntu中实现GATT协议通信在bluez_imu文件夹中创建一个叫做turn_on.sh的文件
打开终端,输入如下命令: ...